声音导引系统硬件设计,其总体结构如下图所示。现就其中几个关键功能模块的设计与元器件选择说明如下:
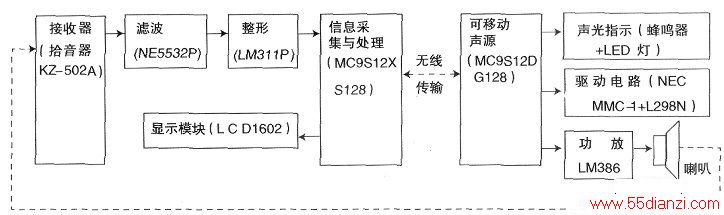
1.主控芯片的选择
因此系统是控制类电路,需要进行大量的信号处理运算,另外控制过程的算法设计也需进行大量运算。要实现快速精确控制,需选用较高运算速度的MCU,选用飞思卡尔公司的DG128和XS128两片16位单片机可很好的满足系统快速性要求。
2.信号处理电路发声器件选用
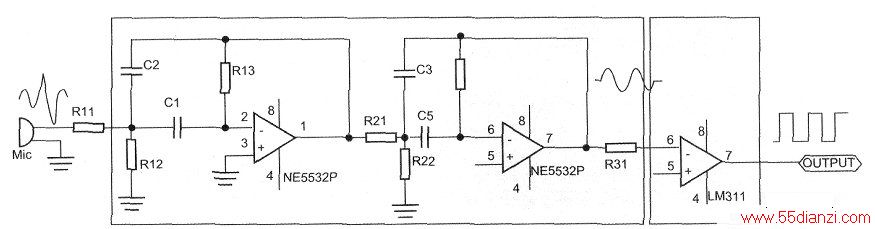
市场上非常普遍的高音喇叭,工作频率范围是5~15kHz;针对本题放大倍数较小,功放芯片使用LM386。再考虑避免噪声干扰,声源采用9kHz的PWM波加一级功放驱动喇叭产生,如下图所示。信号处理电路由典型的带通滤波器和整形电路两部分组成。滤波电路选用NE5532P芯片,整形电路选用LM311。带通滤波器中心频率为9kHz,带宽为4kHz,用于去除噪声,整形电路设计过压比较器将正弦波变换为矩形波输出进行误差测量。阈值通过100kQ的变阻器在实际测试中调节。

电路连接图如下图所示。
3.驱动电路
直流电机的驱动采用NEC提供的MMCP1型号芯片产生PWM波与技术非常成熟的驱动芯片L298结合,具体框图设计如下图所示。

4,无线收发模块
无线接收与发射模块相同,选用NRF24L01无线模块与STCLE2052单片机结合,具体框图连接如下图所示。

一、系统软件设计
1.算法设计
系统欲完成要求的功能,能前进、转弯、调整,并能在没有引导线的情况下,沿着某一直线前进软件设计的重、难点在于可移动声源到中线距离的控制算法的设计。为此我们主要采用了PID算法。
2.工作流程设计系统
采用双MCU结构,他们的工作流图如下图所示。

二、系统调试及测试结果
归纳起来有以下几点:
1.模拟电路与数字电路隔离
在驱动电路制作过程出现电机转动不稳定的现象,原因是模拟电路与数字电路没有隔离,从而出现干扰,系统不稳定。常用隔离器件是光电耦合器件和磁珠。由于有现成的磁珠,故我们使用磁珠,隔离模拟电路与数字电路后电机运行正常。
2.正负电源防反接
制作调试过程有烧坏芯片的情况。一般的芯片对电源极性都很敏感,正负电源反接极易烧毁芯片。
对此,应对芯片加以保护,特别是不易购买的芯片,更应加以保护。一般简单易行的方法是加二极管保护电路和安装防反接接口。
3.软硬件联调
由于硬件原因,采得误差信号数据变化比较大,联调时系统工作不稳定。利用软件的灵活多变性,最终使用软件弥补了硬件的不足。主要采取两级软件滤波分别是初次滤波和二级均值滤波,测试发现大大提高了系统运行的可靠性。另外一开始的控制策略是保持恒定车速,到点即停,试验发现不易控制,容易出界。最后选择PID控制,运动过程速度可变,很好的克服了不易控的缺点,大大改善了系统的性能。
4.测试结果
经过我们坚持不懈的努力,周密思考设计总体方案,合理分配各模块部件的功能和指标,仔细斟酌元器件的选择和各模块的电路设计,最终完成了系统设计。各部分指标如下:
(1)可移动声源产生的信号为周期性音频脉冲信号,声音信号频率为9kHz,脉冲周期20ms。
(2)可移动声源到达指定点后,能进行声光指示。
(3)移动声源平均速度大于15cm/s。
(4)定位误差在1cm左右。
(5)将可移动声源转向180度,能够达到要求。
本文关键字:暂无联系方式声控开关电路,电器控制 - 声控开关电路






