如何获得一个稳定的PID回路
点击数:7998 次 录入时间:03-04 11:37:01 整理:http://www.55dianzi.com PLC工业控制
在开始PID自整定调整前,整个PID控制回路必须工作在相对稳定的状态。
稳定的PID是指过程变量接近设定值,输出不会不规则的变化,且回路的输出值在控制范围中心附近变化。
问题与解决方法:
1.PID输出总是输出很大的值,并在这一区间内调节变化
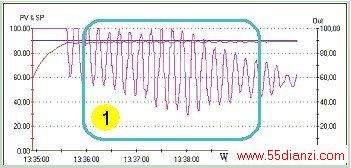
产生原因:
.增益(Gain)值太高
.PID扫描时间(sample time)太长(对于快速响应PID的回路)
解决方法:降低增益(Gain)值并且/或选择短一些的扫描时间
2.过程变量超过设定值很多(超调很大)
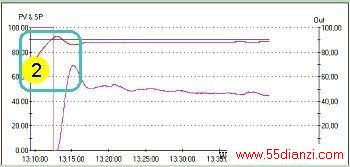
产生原因:积分时间(Integral time)可能太高
解决方法:降低积分时间
3.得到一个非常不稳定的PID
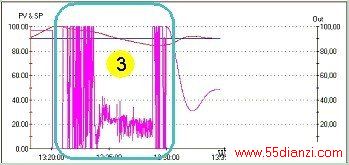
产生原因:
.如果用了微分,可能是微分参数有问题
.没有微分,可能是增益(Gain)值太高
解决方法:
.调整微分参数到0-1的范围内
.根据回路调节特性将增益值降低,最低可从0.x 开始逐渐增大往上调,直到获得稳定的PID。
本文关键字:如何 PLC工业控制,电器控制 - PLC工业控制






