结合上述优点,BD6389已被广泛应用于打印机、传真机、扫描仪、玩具、舞台灯、纺织机、安防等领域。
2.BD6389控制及实现方法
BD6389与其它IC不同之处在于电机输入接口具有PARALLEL-IN模式和CLK-IN模式,这两种接口控制模式可通过设置SELECT引脚的电平进行选择,如表1所示。
表1
SELECT 电平 接口模式 H PARALLEL-IN模式 L CLK-IN模式
2.1 PARALLEL-IN模式控制
PARALLEL-IN模式与大多散步进电机控制芯片一样,只要在对应管教内输入适当的时序即可实现电机的旋转控制。
以实现激励模式为整步控制电机旋转为例,如果对相关管脚MODEO、MODE1、CW-CCW、ENABLE按标注顺序给予对应的电平信号,则BD6398整步控制及电流输出波形示意图如右图所示。
右图中,IOUT为相电流波形,在整步控制模式下,每步输出的驱动电流幅值均为100%输出。在PARALLEL-IN模式下,BD6389芯片硬件支持的激励模式分为整步和半步两种。如果外加DAC,同时控制VREF1、VREF2参考电压,即可实现1/4步、1/8步或正弦波输入等更高的细分控制。
2.2 CLK-IN模式控制
当BD6389工作在CLK-IN模式下时,其控制时序相比PARALLEL-IN模式下更简单,只需对CLK引脚输入时钟信号并对其它相关引脚进行电平匹配的选择1即可实现正/反转控制、速度控制、激励模式选择等。对MODEO、MODE1进行电平配置,即可选择不同的激励模式,如表2所示。CW-CCW引脚用于旋转方向的选择,如表3所示。
表2
MODE0 MODE 1 激励模式 L L 整步模式 H L 半步模式 A L H 半步模式 B H H 1/4步模式
表3
CW_CCW 旋转方向 L 顺时针方向(CH2输出电流波形滞后CHI电流波形90度相位角) H 逆时针方向(CH2输出电流波形超前CHI电流波形90度相位角)
同样,以实现激励模式为整步控制电机旋转为例,在输入CLK引脚时钟之前,对以下各控制口电平配置如下:MODEO=L,MODE1=L,CW_CCW=LENABLE=H、SELECT=L,即无须;IMODEO、MODE1、CW_CCW等输入脉冲,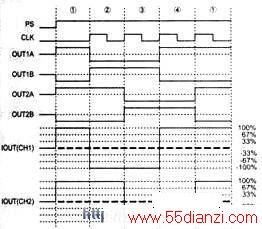
只需固定电平即可;然后将PS=HCLK引脚输入如左图所示的时钟信号,则到步进电机引脚接口的波形如左图中OUT1A、OUT1B、OUT2A、OUT2B所示自动实现整步控制。CLK引脚上的时钟频率决定电机的旋转速率,频率越高,速度越快。
在CLK-IN模式下,BD6389支持盏步、半步A、半步B、1/4步四种激励模式,相比PARALLEL-IN模式,多两种激励桉式,但同时在CLK-IN模式下,BD6389不支持外加的微步控制。
与BD6384相同,BD6389电流衰减模式也支持快、慢、混合三种衰减模式,通常情况下,可将BD6389工作在混合衰减模式,也可根据应用的具体情况,通过观测输出电流波形,选择适当的衰减模式。
在不进行复杂的微步控制时,可以将BD6389的VREF1、VREF2两个参考电压引脚接在一起,通过电阻分压输入固定的参考电压,同时参考电压不宜太大,范围为O~2.OV。若参考电压超过这个范围,则输出电流即不按设定的规则变化,有可能导致芯片损坏或工作失常。因此,在应用中须注意该参考电压的范围。
输出电流除受参考电压影响外,还与反馈电阻相关)反馈电阻RNF不宜太大,太大则会增大功率损耗,增加整个系统的发热量,推荐反馈电阻RNF范围为0.1~O.3Ω。
针对BD6389,其输出电流可根据Io=VREF/RNF/5(A),其中VREF为参考电压,RNF为反馈电阻,同时输出电流不能超过其极限,在选择参数大小时应适当放宽,以避免出错,带来不必要的损失。
4.BD6389控制电机DEMO
为更好地演示BD6389的控制性能,我司设计了针对BD6389功能演示DE-MO。整个DEMO分为主控板和BD6389小板两部分,主控板和小板可以分开使用,便于对BD6389进行二次开发,DE-MO实物如图所示。
整个系统的工作电压可以是24V或12V,主控MCU采用T1公司MSP430系列的MSP430FG413,主控板留有8个按键,通过对按键操作,可实现整步模式、半步模式A、半步模式B、1/4步、加速、减速、待机等功能,并可通过LCD界面显示当前的工作状态。
本文关键字:步进电机 元器件特点及应用,元器件介绍 - 元器件特点及应用
上一篇:数字芯片与模拟芯片的异同






