����Ŀǰ�����е��������߱��ܶ࣬����ʹ�ñȽϹ㷺����CAN���ߡ�J1850�ȡ���Щ���߶�Ҫ����ר�ŵ�������������������ECU��Ԫ�����ݴ����Ҫ��һ�£���Ҫ��������ͬʱ���ü�����ͬ���������硣���⣬��Щ�������ߵ�ʵ������Ҫ����ר�õ�����ͨ�����������������������ڵ�����������ɱ���ά���Ѷȣ��������ڵ����ݴ���������ȶ������ء����Ľ���һ���µ������������ݴ��䷽ʽ�������������ز���������ͨ�ż������÷�ʽ�ڲ����������������Ļ����Ͽ�ʵ�������ڸ�ECUģ��֮������ݴ��������
����1 ϵͳ����ͨ���ŵ�ģ�ͷ���
�������ѹ�����ز�ͨ��ϵͳһ���������������ز�ϵͳ�ĸ���Ҳ�Ǹ��Ӻ�ʱ��ġ��������͵ĵ�����ʱ��ͨ����ʱ�Ͽ���ʹ�õ��ߵ��迹���Ծ��кܴ�IJ����ԣ�ϵͳ�Ĵ��ݺ����渺�صı仯��ʱ�����ı䣬��һ��ʱ��ϵͳ��ͼ1��ʾ��ʱ��ͨ���ŵ�ģ�ͣ������������������������ز�����ϵͳ��ͼ�У������������ű���ʾΪ���Ե�������Ź����⣬ϵͳ�������IJ��ֶ�����Ӧ��Ƶ����Ӧ������ʾ��ͨ��ϵͳ�еĴ��ݺ����Լ�����ģ�Ϳ���ͨ�������õ���Ҳ����ͨ�����۷����õ������ϵͳģ�ͱȽ�ȫ��ظ�����ͨ��ϵͳ���ʱ�����뿼�ǵ���Ҫ���ԡ�
��������������������������
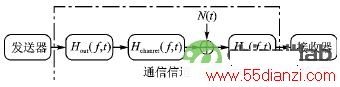
������������������ͼ1 ����PLCϵͳʱ��ͨ���ŵ�ģ��
Ҫ��һ���о������������ز�ϵͳ�����ԣ���Ҫȷ���ŵ�ģ���д������ԵIJ���������ʹ������Aglient��˾������ʸ�����������8712ES����ṹ��ͼ��ͼ2��ʾ������һ������ϵͳ���㹻�ء���ȷ��������������IJ���ʵ�����Dz����ܵġ��������ʵ�鷨�о����ŵ�ģ�͡�ʵ�鷨�ǰ�ϵͳ����һ�����䣬����Ҫ��ȷ֪�����ڽṹ��ֻҪͨ��ʵ��õ�������������źŴ������ԵĴ��ݺ������ܱ������ϵͳ��

��������������������������ͼ2 ��������ǽṹ��ͼ
���������������ز�ͨ���ŵ�����Ƶ����Ӧ��һ�������仯��������̡����������̿��Կ�����һ������Ϊ��2�İ���������һ������ȶ��˲������������ȷ��ѡ������˲�����ϵ�������ܰ����������������IJ�����ʾ���������Ѿ���õ���������������������������ı仯��ʼ�仺������ȷ��ϵͳƵ����Ӧ����3��ϵ����1���������ķ����ʾΪ:������ģ��ϵ����ͳ��������Ϊ��ͨ���ŵ���Ƶ����ӦӦ���ǰ�����������̾���ARģ��ϵ�������ɵ��˲���������������ͨ����������Ƴ����������ŵ���Ƶ����Ӧ������ٶ�ϵ�����Ƕ����ĸ�˹�����������������ͼ3��ʾ�� ��������������������
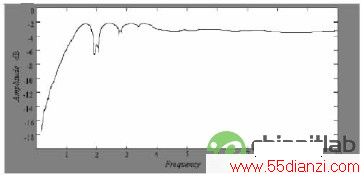
ͼ3 �����������ز�ͨ���ŵ���Ӧ������
�����ڴ���ʵ������Ļ����ϣ���500 kHz��10 MHzƵ���϶������������ز�ͨ���ŵ��Ĵ������Խ������о�����������źŴ��������������ŵ���Ƶ���Ե�3���Իع�ģ�ͣ��õ����½���:
������ �����������ز�ͨ���ŵ�������ͨ����ѹ�������ز�ͨ���ŵ����������Ķ����������⡣
������ �����������ز�ͨ���ŵ�����ʱ���ԣ���Ƶ���ڣ���ʱ����ֻ������5 MHz���µ�Ƶ�ʷ�Χ�ڣ���Ƶ�ʸ���5 MHz��Ƶ��ʱ��ʱ���Բ����ԡ�
2 ϵͳ���
��������������������

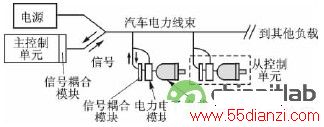
ͼ4 �����ز�ͨ�ŵ��������˽ṹԭ����ͼ
����ϵͳ����ͨ���ŵ�ģ�ͷ��������������ز����߲��������ز�ͨ�ű��� Э�� ��ͬʱ����������ڸ����������ݴ�������Ҫ���ʵ��������齨��ͬ�������ʵ����������ز�ͨ�����硣�����ز�ͨ�����罫��������Ҫ�����ݴ������ʵ�ģ��������һ�𣬶�������Ҫ�ߵĵ���ģ����ʹ�õ���ͨ�����硣�����������ڵ����е����Ϳ���ͨ�����ٵļ������������ֱ�������һ����ɼ�����ϵͳ����Щ��ϵͳ֮��ͨ�����������������أ�ʵ����Ϣ�������ﵽ����������ģ���Эͬ������ʵ���������ܿ��ơ�ͼ4�������ز�ͨ�ŵ��������˽ṹԭ����ͼ�����������˽ṹ�������ز�ͨ��ϵͳ�У�������ģ�����ز�ͨ��ģ��֮������Ӳ����µ������ز�ͨ�����߱���
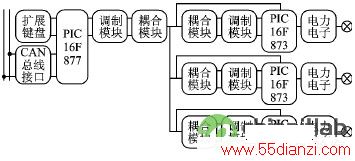
����������е������ز�ͨ��ϵͳ�������ӽṹ�����������ṹ����״�ֲ���ϵͳ�а���һ��������ģ��Ͷ���ӿ���ģ�顣���������˽ṹ�ĽǶ�����������ͨ��ϵͳ������������ģ�顢�������������Լ��ӿ���ģ����ɣ���ϵͳ��������������ͬʱҲ����ͨ���ŵ������á�ͼ5��ʾ���������������ز�ͨ��ϵͳ�е�������ģ����綯�Ŵ����綯�εȸ��ص����������������Ϣͨ�����������������ڸ�������ģ��֮�䴫�䡣
����������������
ͼ5 �����ز�ͨ��ϵͳ��������ԭ��
3 ϵͳ���Ƶ�Ԫ��ʵ��
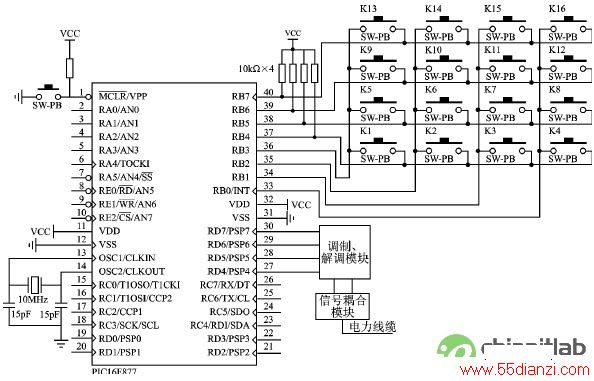
���������ز�ͨ�ż���������������������ϵͳ����������ģ�鼰�ӿ���ģ�顣ͼ6Ϊϵͳ���Ƶ�Ԫ���ӿ�ͼ����ͼ�п��Կ����������ⲿ�ӿ��⣬����ģ����ӿ�ģ��֮��û��̫��IJ�����Ƕ�������CPUģ�顢���ƽ��ģ�顢���ģ�顣��Щ���ǽ����ز�ͨ��������ĵ�Ԫ�����潫��ϸ�����⼸����ģ��ľ���ʵ�֡�
����������������
���� ͼ6 ϵͳ���Ƶ�Ԫ���ӿ�ͼ
�������Ƶ�Ԫϵͳ������PICϵ�е�Ƭ���������Ƶ�Ԫ���õ���PIC16F877�����ӿ��Ƶ�Ԫ���õ�����PIC16F873�� PIC(Peripheral Interface Controller����Χ�ӿڿ�����)����������MicroChip
��˾�Ƴ��ĵ�Ƭ��ϵ�С�
3.1 �����Ƶ�Ԫ�ľ���ʵ��
���������������Ƶ�Ԫ��CPUģ��ľ���Ӧ��Ϊ��������ϵͳ��CPU�ľ���ʵ�֡�ͼ7��ʾΪ�����Ƶ�ԪCPUģ��Ŀ������ӵ�·��
����������ģ��û�о���ĸ��ؿ���Ҫ���ݹ��ܵIJ�ͬ�������Է�Ϊ�ڲ�ϵͳ���ⲿϵͳ�����֡��ⲿϵͳ���棬��Ҫ����ϵͳ�ⲿ������Ϣ���������ã������˻��ӿڼ�CAN����ģ�顣ͨ���ò��֣�ϵͳ���Խ������ⲿ�����������ͬʱҲ�ܹ�����ϵͳ�ĸ�����Ԫģ��״̬��Ϣ�����ⲿϵͳ���ڲ�ϵͳ���棬�����Ƶ�Ԫ�������ǽ��ⲿ��������ת��Ϊ����Ŀ������ݣ�����ϵͳ�ڵĸ����ӿ��Ƶ�Ԫ���Լ����ո����ӿ��Ƶ�Ԫ����������״̬��Ϣ����������ϵͳ������������������á�
��������
ͼ7 �����Ƶ�ԪCPUģ��������ӵ�·
������ģ���ⲿϵͳ�����ʵ����ͨ�������ⲿϵͳ�Ľӿ���ʵ�ֵġ���ͼ6��ʾ��ϵͳ��չ��CAN���߽ӿ������������ڵ�������ϵͳ����Ϣ��������ʵ�������ڸ���ϵͳ����Ϣ������ʹ�����ܹ�Эͬ������ʵ�����������ܿ��ơ�������ģ����չ�ļ���ģ�����ڽ��ղ�����Ա�Ŀ������
��������ϵͳ�ڲ���Ϣ�Ľ�����ͨ���ز����ģ����ʵ�ֵġ���������������֪��ϵͳ���ź����ģ��������͡������������֡������͡������������ֿ������Ա���ϵͳ�ڲ�����Ϣ������ҡ�
���Ĺؼ��֣����� �ز�ͨ����ͨ�ż��� - �ز�ͨ��
��һƪ�������ز�ͨ�ſ����ն����






