作为交流异步电机控制的一种方式,矢量控制技术已成为高性能变频调速系统的首选方案。矢量控制系统中,磁链的观测精度直接影响到系统控制性能的好坏。在转子磁链定向的矢量控制系统中,转矩电流和励磁电流能得到完全解耦[1>。一般而言,转子磁链观测有两种方法:电流模型法和电压模型法。磁链的电流模型观测法中需要电机转子时间常数,而转子时间常数易受温度和磁饱和影响。为克服这些缺点,需要对电机的转子参数进行实时观测,但这样将使得系统更加的复杂。磁链的电压模型观测法中不含转子参数,受电机参数变化的影响较小。矢量控制计算量大,要求具有一定的实时性,从而对控制芯片的运算速度提出了更高的要求。
本文介绍了一种异步电机矢量控制系统的设计方法,采用了电压模型观测器[2>对转子磁链进行估计,针对积分环节的误差积累和直流漂移问题,采用了一种带饱和反馈环节的积分器[3>来代替电压模型观测器中的纯积分环节。整个算法在TMS320F2812 DSP芯片上实现,运算速度快,保证了系统具有很好的实时性。
异步电机矢量控制策略
矢量控制系统组成
矢量控制的基本原理是:根据磁链等效原则,利用坐标变换将三相系统等效为两相系统,再经过按转子磁场定向的同步旋转变换将定子电流分解为相互正交的两个分量励磁电流分量isd与转矩电流分量isq,即用这两个电流分量所产生的电枢反应磁场来等效原来定子三相绕组电流所产生的电枢反应磁场。然后分别对isd和isq进行独立控制,这样就可以将一台三相异步电动机等效为直流电动机来控制,因而可获得与直流调速系统同样好的静态及动态性能。
本文所介绍的异步电机矢量控制系统的原理框图如图1所示。
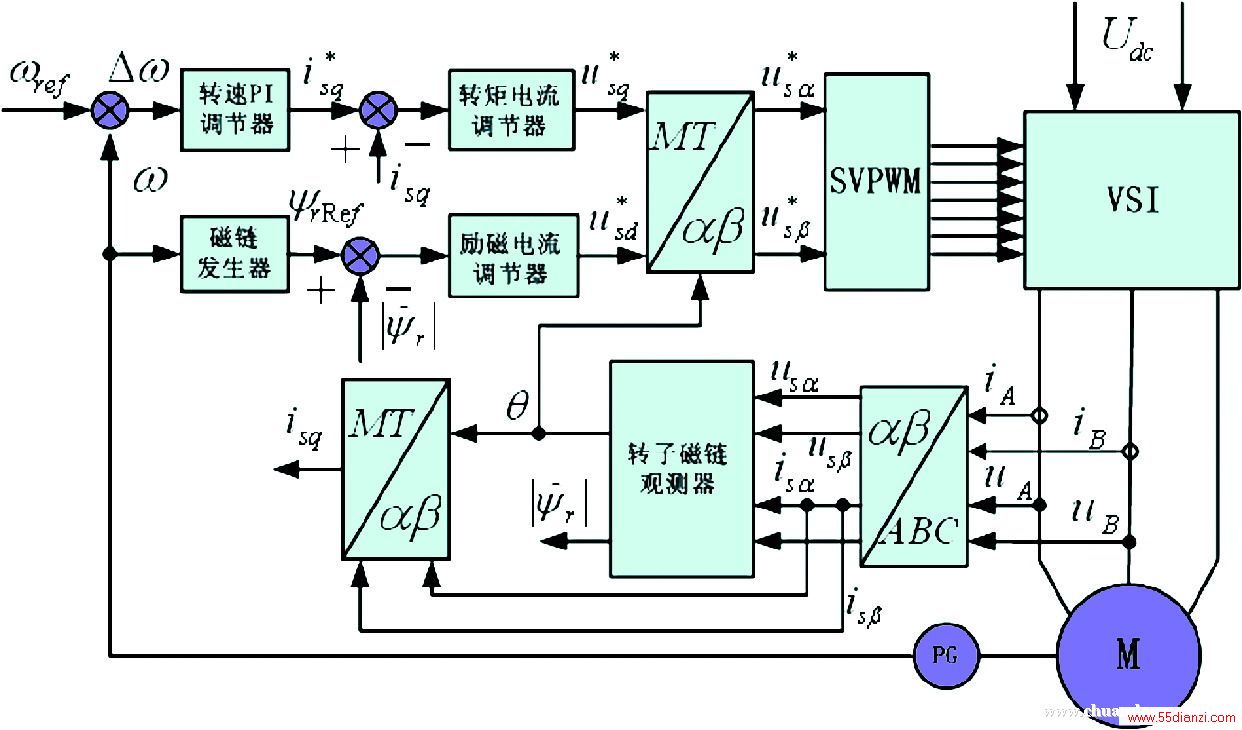
图1 感应电机矢量控制系统
系统采用速度外环控制、电流内环控制的双闭环结构形式。当系统运行的同步频率在电机额定频率以下时,激磁电流isd为电机额定激磁电流,在额定频率以上时采用弱磁控制。图1所示系统中采用了3个PI调节器。转速调节器根据转速差输出转矩电流的给定值,转矩电流调节器和励磁电流调节器分别调节转矩电流和励磁电流分量。转子磁链观测器根据实际电机输入电流、电压观测出转子磁链的大小和角度。
转子磁链观测
从控制理论的角度来讲,一个控制系统的精度主要取决于反馈信号的精度。所以按转子磁链定向矢量控制的精度主要取决于磁链估计的精度。而由异步电机的磁链电压观测方程式
 (1)
(1)
可知,磁链是由反电动势积分得到,为了解决纯积分带来的积分器饱和初值等问题,本系统采用了带饱和反馈环节的积分器[3>来代替纯积分环节,其原理框图如图2所示。
磁链观测器的输出为:
 (2)
(2)
其中,
 ,
, 为电机反电动势;为饱和环节的输出。当转子观测磁链小于等于转子磁链的给定值,即
为电机反电动势;为饱和环节的输出。当转子观测磁链小于等于转子磁链的给定值,即 时,
时, ;当转子观测磁链大于转子磁链的给定值,即
;当转子观测磁链大于转子磁链的给定值,即 时,
时,
。所以当 时,磁链观测模型为:
时,磁链观测模型为:
 (3)
(3)
上述观测模型变为一纯积分环节,即普通的电压观测模型。当 时,磁链观测模型为:
时,磁链观测模型为:
 (4)
(4)
由上式可知,当合理选取 的大小时,即使输入存在直流偏置信号,转子磁链观测模型输出也不会出现积分饱和,能有效抑制直流偏移。模型中的选取很关键,选取过大会造成输出有较大的直流分量,选取过小会造成输出有较大失真。在本系统中取
的大小时,即使输入存在直流偏置信号,转子磁链观测模型输出也不会出现积分饱和,能有效抑制直流偏移。模型中的选取很关键,选取过大会造成输出有较大的直流分量,选取过小会造成输出有较大失真。在本系统中取 (转子磁链给定)。
(转子磁链给定)。
矢量控制系统的硬件实现
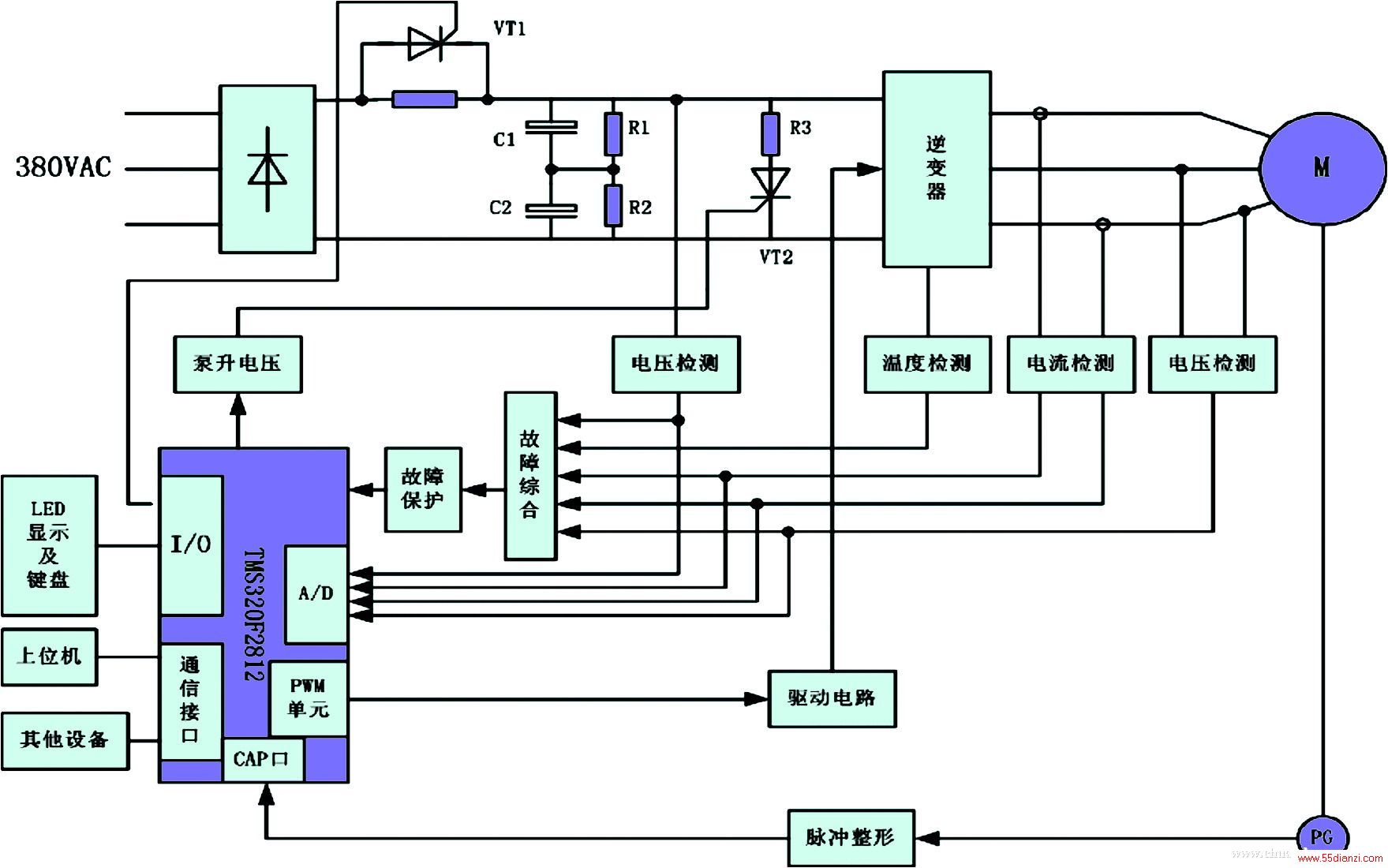
基于TMS320F2812的矢量控制方案组成的交流变频调速系统的结构框图如图3所示。

图2 带饱和反馈的转子磁链电压观测模型