当超声波传感器发出的超声波遇到物体返回时,探头接收其反射回波信息,从而可对接收到的反射回波进行分析、判断和计算,得到物体到探头的距离并判断物体的形状。其触发脉冲间隔时间可由程序控制。本系统采用5~10 ms间隔,可测最大距离为850~1700 mm。
设传感器与物体之间的距离为L,空气中的声速为c,从发射超声波脉冲到接收到反射波的传播时间为Ts,则:

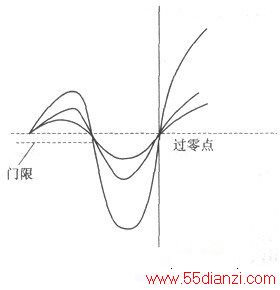
传播时间Ts测量的准确性直接影响着测距精度。我们测量从发射脉冲到接收到反射波的第一个过零点之间的时间(零交叉点)为Ts。这个时间比超声波真实往返时间稍长,要加以修正。但这种方法较好地利用了接收到的反射波的上升沿几乎不随对象物形状变化而变化的特性,因此其测量的时间不随反射波信号幅度大小而变化,从而能进行高精度的距离测量。
所谓“零交叉点”,就是过阈值(门限)后的第一个零点,以该点来确定反射波的到达。如下图所示,反射波过零点不随波形变化。
对于距离测量精度的另一影响因素是温度变化和系统电路的时间延迟。温度变化对声速c产生影响,可通过温度传感器进行实时补偿。即:
c=co +0. 67t
式中:co为标准声速(0℃时);t为实时测量温度(℃)。系统时间延迟,可以由计算方法加以修正。
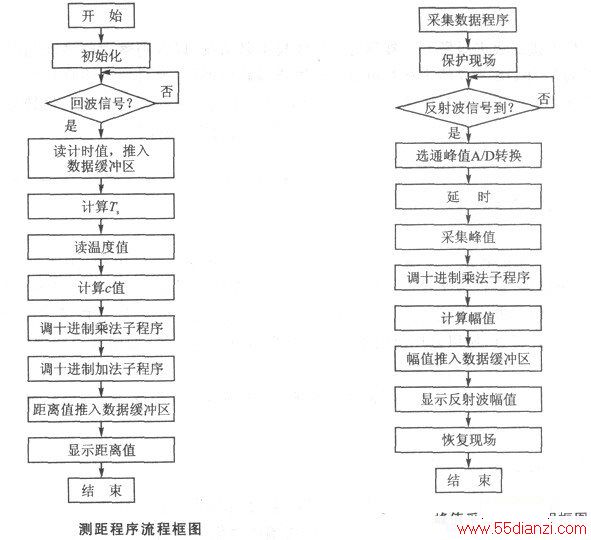
通过以上的设计措施和修正,使本系统具有较高的测距精度。经测定,本系统的测距在50~850 mm范围内,其测量误差在0.2 mm以内。测距程序和峰值采集程序流程框图如下图所示。
此超声波视觉识别系统具有高精度测距功能。应用本系统,通过对物体进行扫描,以采集距离信息和反射波幅值信息,可对零件的形状、姿势进行示教识别。实验结果证明:对中等尺寸有一定复杂程度的零件,如凹凸形,阶梯形,带孔、槽和斜面的轴类、盘类和箱体类等零件具有识别能力。这为自动化生产中零件形状特征的识别、检测、分类提供了新的途径。由于超声波视觉识别系统具有一些特殊优点,对进一步研制、开发和利用超声波视觉识别系统都具有重要的理论价值和实用价值。






