电机驱动采用PWM方式,有效的利用了DSPTMS320F2812的片上资源。工作原理图如图7所示。

为保证系统平稳运行和良好的动态特性,流过电机的电流经放大后送到TMS320F2812内部的A/D进行采样。
2.6 外围通信接口
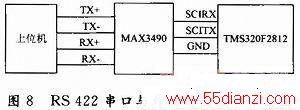
TMS320F2812内部设有串行通信模块,利用串行通信模块配置RS 422串口与外围系统、测试设备等的上位机进行通信,如图8所示。可以采用定长帧的通信协议,上位机发送指令,DSP处理器则对命令进行响应。
3 实验结果
控制电路设计完成后,进行软件的设计。软件设计包括系统初始化、中断服务程序、控制算法实现、特殊情况处理等。控制算法优先考虑工程中较为成熟的PID控制。在平台结构件、光学件及各传感器安装完成后,控制电路对平台实现了闭环控制。将稳定平台安装在仿真转台上,通过目标模拟器产生目标,驱动仿真转台相对目标作3°,3 Hz正弦摆动,此时稳定平台工作在稳定状态,光轴相对空间稳定。对稳定平台上的红外探测器产生的图像进行观察并记录和分析,结论是像点稳定,抖动量约为1个象素,满足系统性能需求,所以得出结论,以数字处理器TMS320F2812为核心组成的控制系统能够实现对稳定平台的控制。
4 结语
光轴稳定平台在军用、警用、民用等领域获得了大量的应用。以DSP为核心的稳定平台控制电路设计已成为主流趋势。本文中,使用了数字处理器TMS320F2812实现了对平台各传感器信息的数据处理及控制回路的数字仿真,极大的降低了控制电路的复杂度,提高了可靠性。该控制电路不仅满足了系统高速、高精度的要求,同时也为一些复杂的、先进的控制算法的探索和使用提供了一个物理平台。
本文关键字:伺服 综合-其它,单片机-工控设备 - 综合-其它






