内容摘要:为了实现光电跟瞄平台的控制回路功能,通过分析其系统构成以及伺服平台控制器进行数字化设计的必要性,提出了基于TMS320F28 12的一种全数字稳定平台伺服系统的设计,实现了DSP数字电路和电机驱动电路的设计验证工作。试验结果表明该电路较好地满足了控制回路的需求,控制精度高,运算实时性好。
关键词:TMS320F2812;稳定平台;数字伺服系统;DSP
引言
稳定跟踪平台由于能隔离载体(战车、导弹、飞机、舰船)的运动,对目标进行自动跟踪,所以在现代武器系统中得到了广泛的应用。对于各种车载、舰载、机载和弹载类光电成像设备,要求在载体的运动过程中成像清晰。稳定平台的主要功能是:保证视轴稳定,克服载体姿态变化对跟踪系统的影响,同时要在控制指令的驱动下完成对目标的捕获和跟踪。它的成像稳定一般有三种方式:机械稳像、光学稳像、电子稳像。机械稳像一般有陀螺直接稳像和稳定平台稳像两种。陀螺直接稳像通过将被稳定的光学系统或成像器件安装到一个旋转的陀螺上,利用陀螺的自稳定特性实现视轴的稳定;稳定平台稳像是将光学系统及成像器件安装在一个装有惯性传感器陀螺的平台上,形成陀螺稳定平台。
通过对稳定平台数字控制器进行需求分析以及对硬件性能方面的比较之后,该系统电路的处理器选用TI公司的TMS320F2812。这是一款用于数字控制处理领域的高性能数字信号处理器,最高工作频率可达150 MHz,是目前广泛用于电机控制领域的32位定点DSP芯片。乘法运算是CPU运算中最费时的一种运算,在处理乘法运算方面,F2812的CPU集成了一个16×16位的硬件乘法器,能够很方便地进行16×16位和32×32位的乘法运算。F2812具有数字信号处理能力、强大的事件管理能力以及嵌入式控制功能。本文基于TMS320F2812设计了一套稳定平台控制电路。
1 系统组成及描述
稳定平台系统主要由台体及控制电路组成。其中台体由框架、测角器、电机和测速陀螺组成。稳定平台根据使用要求的不同可以由两轴、三轴及多轴组成,下面着重介绍两轴稳定平台的系统组成,如图1所示。
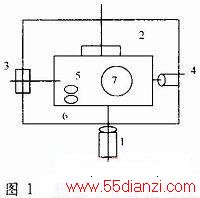
图中:1为方位电机;2为方位旋转变压器;3为俯仰旋转变压器;4为俯仰电机;5,6为光纤陀螺:7为光学系统及红外探测器。
该稳定平台具有方位和俯仰基本相同的两套稳定控制回路,通过这两套控制回路使平台在空间具有了稳定视线功能。在此基础上,由平台、成像系统和图像跟踪器构成目标跟踪控制回路。

平台利用速率陀螺来测量台体在偏航和俯仰方向上的空间角速率,构成速率稳定回路,回路结构简如图2所示。当载体运动产生的干扰力矩作用于平台时,台体产生的角速率被陀螺敏感,其输出电压经过控制电路处理后送给力矩电机产生相反的力矩来平衡干扰力矩从而使光轴对惯性空间稳定。
2 控制电路分析与设计
2.1 控制电路总体设计
平台在干扰力矩作用下产生角运动时,平台上陀螺输出与其运动速率成正比的电压,该电压信号放大后经A/D转换输入DSP进行运算。 DSP完成控制算法后其结果通过PWM通道输出给电机驱动模块驱动电机,抵消干扰力矩,从而保持平台稳定。当它处于目标跟踪模式时,DSP通过SPI接口接受目标参数,进行目标跟踪。控制电路通过RS 422接口接受上位机指令,完成状态切换。如图3所示。

2.2 TMS320F2812的结构特点
电机微控制器TMS320F2812具有下述部件:
CPU、片内RAM,ROM,FLASH、专用电机控制的事件管理器和片内外设等。主要性能如下:
采用高性能静态CMOS(StatICCMOS)技术:150 MHz(时钟周期6.67 ns)、低功耗(核心电压1.8 V,I/O口电压3.3 V)、FLASH编程电压3.3 V;高性能32位中央处理器包含16×16和32×32位的乘法累加器操作,16×16位的双乘法累加器,哈佛总线结构;片内存储器包含128K ×16 b的FLASH存储器,共计18K×16 b的单周期访问随机存储器(SARAM);3个32位的CPU定时器;2个事件管理器(EVA,EVB);串口外围设备:SPI、2个SC1、增强局域网络(eCAN)、多通道缓冲串行接口(McBSP);双12位模/数转换模块:含2×18通道复用输入接口,2个采样保持电路,单/连续通道转换,流水线最快转换周期为60 ns,单通道最快转换周期为200 ns,可以使用2个事件管理器顺序触发8对模/数转换;多达56个独立的可编程、多用途通用输入/输出(GPIO)引脚。本文设计的控制电路充分利用了F2812的片内外设,大大降低了电路的复杂程度。
2.3 角度解算电路
旋转变压器(以下简称旋变)是基于电磁感应原理而工作的,其输出电压随转子转角变化,定子、转子均由绕组组成,相互之间没有电刷的滑动接触,在高低温及振动冲击下具有较高的可靠性。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正、余弦函数关系。旋变工作原理如图4所示。
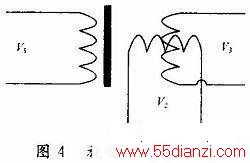
V2=Ksinθsinωt;V3=Kcosθsinωt
式中:K为放大倍数,θ为定子与转子之间的夹角。
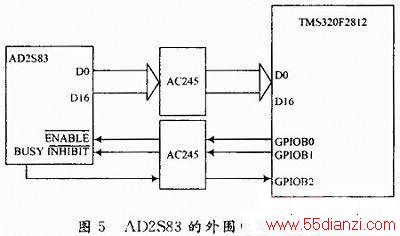
AD2S83是一种专用的跟踪式旋转变压器-数字转换器,可以输出10位、12位、14位或16位的位置信号,其测量转速最高达62 400r/min,采用比率转换跟踪方能够连续输出位置数据而没有转换延迟,具有较强的抗干扰能力。AD2S83外围电路连接如图5所示。
2.4 陀螺信号采样电路
陀螺输出信号经过前置放大器放大后进入A/D进行转换,由于陀螺安装在稳定平台上,而伺服控制板通常都在平台后端的电子舱内,信号传输距离较长,因此将前放电路制作为体积比较小的电路板安装在陀螺附近进行信号的放大,放大后再传输至A/D进行转换。转换芯片选用ADS8361作为片外ADC模块,虽然TMS320F2812有16通道的12位ADC,但是为了进一步提高系统的A/D转换精度,增加了片外外设ADS8361。 ADS8361是2+2通道,16位的A/D转换器,最高转换速率可以达到500 kHz。它工作在50 kHz频率时具有极强的抗干扰能力,特别适合数据采集的高采样率要求的场合。此外,ADS8361还提供高速双串行接口,可以有效将DSP的MCBSP内部时钟作为ADS8361的时钟,ADS8361按照CLOCK时钟信号每20个CLOCK周期ADS8361采一次数,并由串口输出,转换数据是先从高位(DB15)开始传输。将MCBSP的帧同步信号作为转换开始信号CONVST。当CONVST从低变到高,器件开始采样保持。CLOCK为ADS8361的时钟信号,每20个CLOCK周期ADS8361采1次数,由串口输出,转换数据是先从高位(DB15)开始传输。CONVST为转换开始信号。当CONVST从低变到高,器件开始采样保持不依赖于状态和外部时钟。RD是串行输出的同步脉冲。将它设置成与CONVST信号一致,即可以正常工作。CS为片选信号,低电平选通。ADS8361有4种工作模式,由A0,M0,M1共同控制。这里选用的是它的工作模式1,即A0=0,M0=0,M1=0,通道0和1同时进行转换。图6为ADS8361与F2812的连接图。

2.5 电机驱动电路
本文采用了永磁式直流力矩电机,使用PWM方式驱动,与可控整流式调速系统相比有下列优点:由于PWM调速系统的开关频率较高,仅靠电枢电感的滤波作用就可获得平稳的直流电流,低速特性好;同样,由于开关频率高,快速响应特性好,动态抗干扰能力强,可以获得很宽的频带;开关器件只工作在开关状态,主电路损耗小,装置效率高。
A3952SB是Allegro公司生产的一片全桥式的PWM驱动芯片,可以连续工作于输出电流为±2 A,电压为50 V的情况下。内置的离线PWM电流控制电路可以用来调整最大负载电流到期望值。内部电路保护还包括带滞后的高温掉电、滤波二极管和电流交叉保护功能。
本文关键字:伺服 综合-其它,单片机-工控设备 - 综合-其它






