����1.����
�����ڹ�ҵ�ֳ����������¡����պ����������Ҫ���õ�·������Դ���п��ٵĹ�����ϣ���Ҫ���·���� �Բ��� ���ܡ�Ϊ��ʹ���ӵĵ�·�����Բ��Թ��ܱ������ר�ŵĿɲ��Է��������[1]����ͨ�������������ģ�����о�����ϵͳ�Ŀɲ�����һ��ȷ����Ч�ķ��������ò��������ģ�ͣ�������ܽ�������ϵͳ���ϳ�һ�����в�νṹ��������ϵ������һ����ϵͳģ�Ϳ���£�����ϵͳ�Ŀɲ��Է�������ȷ������ϵͳ �ɲ������ �������Ϸ���[2-3] ��
���� ���ź�ģ�� ���źŵĶ�ά�������֣��Ľ���������ģ�ͽṹ�еĹ���Ӱ���ϵ�����������IJ��㣬ͬʱ��˽ṹ��ģ�ͽ�ģ���ٵ��ŵ㣬�ڴ�����ϵͳ�еõ��˳ɹ�Ӧ��[4-7] �����ź�Ϊģ�����ֹ��϶�ϵͳ���ܵ�Ӱ��Ч�������˹��ܹ��Ϻ���ȫ���ϡ����ź�ģ�ͽ���ṹ��ʧ��İ취���ҳ����Ӱ����ź�����Ե����ܼ����źŵ������ϵ[8-10] ��
�����������ݲɼ�����FPGA��DSP �ȴ��ģ���ɵ�·��ɣ��ǵ��͵� �弶��· ���㷺��Ӧ���ڹ�ҵ��ũҵ���������������IJ��ö��ź�ģ�Ͷ����ݲɼ��������˿ɲ��Է�����ɲ�����ƣ�ʹ�������ݲɼ������Բ��Թ��ܣ��������ϼ���ʼ����ϸ����ʣ�����ֳ��弶��·Ҫ����ٽ��й�����ϼ����϶�λ��Ҫ��
����2���������ݲɼ����Ķ��ź�����ģ
����ԭ���ݲɼ�ϵͳδ���ǿɲ��ԣ�ϵͳ���������ṩ�IJ�����Ϣ���ޣ�������Ҫ�������ݺؼ���������ȡ��һЩ�������Բ����ʵ�ְ弶�Բ��ԣ���һЩ��������á�����ԭʼ�ɼ����Ŀ����ź���5 ��������ĸS ��ʾ��S1-���桢S2-���Զȡ�S3-ֱ��ƫ�S4-ϵͳ���ȣ�S5-�ɼ����ʡ����ݲɼ�������9 ��ģ�飬ÿ��ģ���й��ܹ���(����ΪF)����ȫ����(����ΪG)�������ϣ���18 �����ϣ��ҳ���ɵ�Ԫ���źŵ�Ӱ���ϵ�����1 ��ʾ��
��1 Ԫ�����źŹ�����ϵ

�����ƶ��ĵ�·���ܲ�����Ϸ��������ò��Ե�Ͳ��ԣ����ݼ���2���ɴ˿��Խ������ݲɼ����Ķ��ź�ģ��[11]����ͼ1 ��ʾ��
��2 �������ơ�λ�úͼ���ź�����

����ģ�͵���ʽ���������¡�
����ϵͳ��ɵ�Ԫ��C={�Ŵ��·1���Ŵ��·2���˲���·1���˲���·2����·AD ת��ģ�飬��·AD ת��ģ�顢���ģ�顢DSP ģ���FPGA ģ��}��
�����źż�S = {S1��S2��S3��S4��S5}�����Ե�TP = { TP1��TP2��TP3��TP4��TP5}��
�������Լ�T = {t1��t2��t3��t4��t5��t6��t7��t8��t9��t10}��
����Ԫ���źż�SC(ci) ={}��
�������Ե�������Լ�SP={SP(TP1)��SP(TP2)��SP(TP3)��SP(TP4)��SP(TP5)}��
���������źż�ST={ ST(t1)��ST(t2)������ST(t10)}��
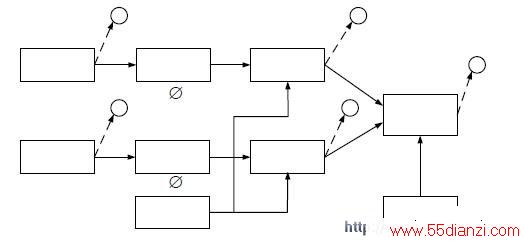
ͼ1 ���ݲɼ����Ķ��ź�ģ��
����3���������ݲɼ����ɲ���
������ƶ��ź�ģ�͵ķ����������ָ���ɲ�����ƣ�Ϊ�����Աָ��ϵͳ���ڲ��Ե�Ӳ��ȱ�ݣ����Ե�Ͳ���ѡ��IJ�����֮����ͨ��ģ�ͷ���Ҳ�����ж�ϵͳ��ģ����ܻ����Ƿ���������ڶ��ź�ģ�͵Ŀɲ��Է������Խ�����¼���ϵͳ������⣬ֱ��ָ���ɲ�����Ƶľ��巽��
����(1)ģ�ͻ��ֵĺ����ԡ����ź�ģ�͵�ģ�黮�ַ���������Ϊϵͳʵ����ƵĻ��ַ����������Ĺ��ܺͽṹ���������Ӳ�������IJ������Ե���Ҫ�ֶΡ�������Ҫ�Ӳ�Ʒ��Ρ��ṹ�͵����ȽǶȰѸ���ϵͳ����Ϊ�ϼ��ɵ������Եĵ�Ԫ�����С�
����(2)�ź�ѡ��ľ����ԡ������źŵĶ����Ը� �弶��· ���Դ����Ѷȡ�����������ڹ������ʱδ�Թؼ��źŵļ�����Ӳ��֧�֣�ʹ��ϵͳ�Ĺ��в������Խ��͡��������������ϲ��Զ����������й��ϡ���ģʱ���е��źŶ���������Է�����������ɱ�ѡ�źţ��������൱һ����������ȱ�ٰ弶�����豸������¼��ġ���ʱ���Բ����ź����ﵽ����ȫ�����ϵ�Ŀ����Ȼ�Dz���ʵ�ġ��� ���ź�ģ�� ���źŷ���ʱ�ܹ�ָ��ϵͳ�����źż��������źż��IJ������߿��Ը��ݲ�е��ź���Ƽ���·���ṩ����ͨ����
����(3)����ʩ�ӵ���Ч�ԡ������������˵�����Ե�ѡ����࣬����˲�����Դ���˷ѡ�����ԭ���Ƕ���IJ���δ���ṩ�µĹ�����Ϣ�������ڹ��ϵĸ��롣������������Ӳ��Ե�Ͳ��Բ������ڸ��ƿɲ��ԣ�Ӧ��ʹ���������������Ĺ�����Ϣ�����в��Լ��Ĺ�����Ϣ���н����ֲ���ȫ��ͬ��
�������ĸ��ݶ��ź�ģ�͵Ŀɲ��Է���������� �ɲ������ �������¡�
����(1)ԭ���ݲɼ���������ʵ�ʹ��ܻ��֣�����Ϊ�źŵ�����ģ��ת���������ڲ�������������ĸ���Ҫģ�顣�������ַ����ϣ���ģ��֮�������㹻�ռ��Է����ģ����Լ���������ͱ������Ϣ�Ĵ��ݡ�
����(2)�����źŶ��巢�������źż���5 ��Ԫ�ء����ԭ���ݲɼ����Ŀɲ���ָ��ϵ͵�һ��ԭ����ǿ����ź������١�������ϵͳ�ṹ���ޡ����ڰ弶ϵͳ��ijЩָ������ȱ�ټ���豸�������ԣ���Щָ������ȱ�ٲ���ͨ��ʹ�ò����������ɼ�����Щָ��������ϵͳ���������ض�������ߺ����ˡ����ڴˣ������ݲɼ���������������ӿ����źţ����ƿɲ��ԡ�
��������FPGA ����ƿɵ��������źŲ�����·DSP ģ����ơ�
�����ڽ�ֹƵ�ʲ��Ե�·��ͨ�����뷽���ɼ����ƽ����ѹ�ķ�ʽ����ȡ�˲����Ľ�ֹƵ�ʡ�
��������DSP ����ר�ñ߽�ɨ��оƬ��ɾ��б߽�ɨ��ṹоƬ�IJ��ԡ���Ҫʵ��FPGA �ں����IJ��ԡ�
�����ܰ�FPGA �ڵ�����·���ݹ��ܽ��зֿ���ƣ�ԭ�����Ҫ�����ܼ�������·ģ��֮����ź���ϵ��ʹģ���·�������ź���Ŀ���١�
������FPGA �ڲ�������ݲɼ�����ȡ������Ƶ�ʡ�
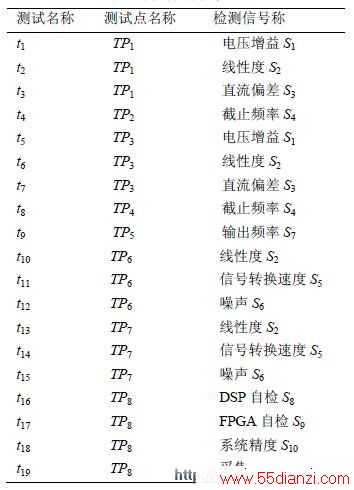
����ͨ���������ʹ��ԭ���ݲɼ������ܲ��ԵIJ�����������Ϊ�ź��ˡ���������6 ���źţ���ֹƵ�ʡ�ת���ٶȡ�������PLL ���Ƶ�ʡ�DSP �Լ�ָ���FPGA �Լ�ָ�ꡣ��������ѡȡ���ź���11 �������±�ź���ʾ���¡�S1-���桢S2-���Զȡ�S3-ֱ��ƫ�S4-��ֹƵ�ʣ�S5-ת���ٶȣ�S6-ת��������S7- PLL ���Ƶ�ʣ�S8-ת���ٶȣ�S9- FPGA �Լ�ָ�꣬S10-ϵͳ���ȣ�S11-�ɼ����ʡ��µ��ź���Ԫ��������ϵ����3��
��3 Ԫ�����źŹ�����ϵ

����(3)���źŵļ���ʹ��ϵͳ���������µIJ��Ե���µIJ�����Ŀ���µIJ��Է���������4 �����Ե㣬Ϊ��������ź�ʹ�ò������ӵ���19 ��������ģ�����½��пɲ��Է���������4 ��������ԡ������²��Է�������15 ��������Ŀ�����������Ŀ�����ơ��������ݺͲ���λ�ü���4��
�������ɲ�����ƺ�ԭ��δ���������ܼ������ϼ������ԭ����1.72% ��ߵ�100% ����������δ������Ͼ��Ը��뵽һ��ģ�飬ʹ�����й���ȫ�����ֿ��������ϸ����������ǰ��12.97% ��ߵ�100% ���ɲ�����ƺ�����ݲɼ����Ŀɲ��Է��������ԭ���ݲɼ��ķ���������ڱ�5���ɴ˱����Կ����ɲ������Ч����
����4. ����
��������ͨ�������������ݲɼ����Ķ��ź���ģ�ͣ������ݲɼ��������˿ɲ��Է����� �ɲ������ ��ͨ���ɲ����������ϼ���ʺ��ϸ����ʾ��ﵽ100% ���ڴ˻����Ͽ���ͨ��DSP ���������·�� �Բ��� �����ĵ��о��ɹ�Ϊ��ߵ�·���Բ��������춨����������Ӧ�ֳ����ٹ�����Ϻ��϶�λ����Ҫ���������ߴ��µ�:�����һ�� �弶��· �ڽ��Բ��� ��ģ���� �����ԭ�е���ϵͳ�����ڽ��Բ��ԵĿɲ��Լ����������ö��ź�����Ϊ����������ͨ��ʵ��ϵͳ��֤������������Ŀ����Ժ�ʵ�ʼ�ֵ��
��4 �������Ƽ�λ��
��5 �ɲ��Ը��ƶԱȱ�

���������
[1] GJB2547-95 ��װ�������Դ�٣�S�ݣ����������ҿ�ѧ������ҵίԱ�ᣬ1995
[2] ���٣�ʯ���ѣ�ϵͳ��������Ʒ�������֤��M�ݣ��������������պ����ѧ�����磬2003
[3] ����ξ���ɲ���������о�[J]�����������Ϣ����2008��1-1��157-159
[4] SOMNATH Deb, KRISHHA R Pattipati, VIJAY Raghavan, et al��Multi-signal flow graphs�� a novel approach for system testability analysis and fault diagnosis��1994 IEEE Autotestcon Proceedings, 1994, 361-373
[5] Deb, S., Ghoshal, S., Malepati, V.N. and Kleinman, D.L., 2000, Tele-diagnosis: Remote monitoring of large-scale systEMS, Proceedings of the IEEE AerosPACe Conference, Big Sky,MT
[6] �����£�����ǿ��ţ˫�ϣ����� ���ź�ģ�� ��ϵͳ�����Խ�ģ�������J�ݣ��������ѧ����2007��14��5����364-368��394
[7] Jianhui Luo, Haiying Tu, Krishna Pattipati, Liu Qiao and Shunsuke Chigusa, ��GraphICal models for diagnostic knowLEDge representation and inference,�� IEEE Instrument and Measurement Magazine, Vol. 9, No. 4, pp. 45 �C 52, Aug., 2006
[8]Jianhui Luo, Kihoon Choi, Krishna R. Pattipati, Liu Qiao and Shunsuke Chigusa, ��Distributed fault diagnosis for networked, embedded automotive and aerospace systems,�� Proc. Of IEEE International Conference on Systems, Man, and Cybernetics, Taipei, Taiwan, Oct., 2006
[9] F. Tu, K. R. Pattipati, S. Deb, and V. N. Malepati, ��Computationally efficient algorithms for multiple fault diagnosis in large graph-based systems,�� IEEE Transactions on Systems, Man and Cybernetics�CPart A, vol. 33, no. 12, pp. 73�C85, 2003
[10]M. Shakeri, ��Advances in system faultmodeling and diagnosis,�� Ph.D. dissertation, Univ. of Connecticut, Storrs, 1996
[11]G. Simon, G. Biswas, S. Abdelwahed, N. Mahadevan, T. Szemethy, G. Peceli, and T. Kovashazy, ��Model-based fault-adaptive control of complex dynamic systems,�� in Proc. Instrumentation Measurement TechnologyConf., Vail, CO, May, 20�C22 2003
���Ĺؼ��֣����� �ۺ�-��������Ƭ��-�����豸 - �ۺ�-����






