西门子S7-200PLC运动控制模块EM253寻找参
西门子S7-200PLC运动控制模块EM253寻找参
点击数:7703 次 录入时间:03-04 11:51:55 整理:http://www.55dianzi.com 西门子plc应用
接下来我们介绍一点背景知识:一些数控机床会采用带增量型编码器的伺服电机。编码器采用光电原理将角位置进行编码,在编码器输出的位置编码信息中,会有一个零脉冲信号,编码器每转产生一个零脉冲。当伺服电机安装到机床床身时,伺服电机的位置确定,编码器零脉冲的角位置也就确定了。由于编码器每转产生一个零脉冲,在坐标轴的整个行程内有很多零脉冲,这些零脉冲之间的距离是相等的,而且每个零脉冲在机床坐标系统的位置是绝对确定的。为了确定坐标轴的原点,可以利用某一个零脉冲的位置作为基准,这个基准就是坐标轴的参考点。结合示例1,我们已经知道真正能够确定寻参后电机在轨道上位置的是RPS的右侧边沿,然而RPS是外部接入的开关信号,难免会出现偏移。这将使得寻参后的RP发生偏移。这样就不能保证每次寻参后电机都能停在轨道的相同位置。然而根据ZP的定义可以想见:电机及其随动设备一旦安装完毕,ZP信号在运行轨道上的位置也随之固定。如果采用穿过RPS后的ZP数来定位,即使RPS信号的下降沿有一点点偏移,最终的RP都将定位在确定的位置。所以说,综合使用RPS信号和ZP信号作为最终定位的依据,会使得RP(参考点)的定位更加精确。基于以上的应用需求,位控向导为我们提供了模式3和模式4。如果选择模式3定位RP,则在RPS输入变为无效后接收到指定ZP个脉冲后确定RP,所以参考点RP位于RPS输入的有效区外。如果选择模式4定位RP,则在RPS输入变为有效后接收到指定ZP个脉冲后确定RP,所以参考点RP通常位于RPS输入的有效区内。接下来我们仍然使用一个例子,更好的理解一下应用ZP脉冲数精准定位的功能。 示例2:
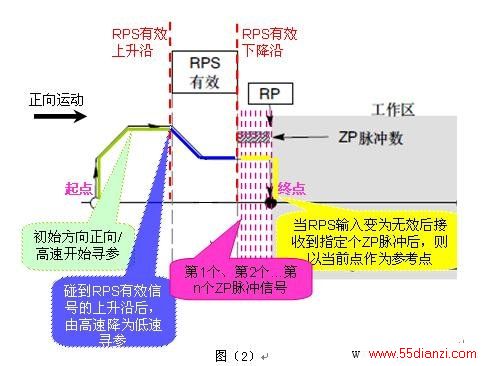
向导中设置初始寻找方向为正向,最终接近方向为正向。选择模式3。如果起点在如图(2)位置,执行POS_RSEEK指令后,首先按照高速正向寻找,当检测到RPS信号上升沿后,由高速降低到低速继续寻参,当RPS信号失效即检测到RPS下降沿后继续低速寻找参考点,直到接收到指定的ZP脉冲数,则以当前点作为参考点,即终点。
 如果向导中高级RP选项设置RP_OFFSET=0,当找到参考点后,则当前位置即为零点。如果RP_OFFSET非零,例如RP_OFFSET=150,则当找到参考点后,当前位置即为150。按照以上的思路,大家可以进而学习了解RP寻找模式3和4的其他运动轨迹。在实际的应用中,为了确定参考点的位置,通常在数控机床的坐标轴上配置一个参考点行程开关。数控机床在开机后,首先要寻找参考点行程开关,在找到参考点行程开关之后,在寻找与参考点行程开关距离最近的一个零脉冲作为该坐标的参考点,根据参考点就可以确定机床的原点了。读到这里,相信您对EM253定位功能又有了一些新的认识吧。我们这里仅仅抛砖引玉,希望对您的学习和使用能有一点点的帮助。
如果向导中高级RP选项设置RP_OFFSET=0,当找到参考点后,则当前位置即为零点。如果RP_OFFSET非零,例如RP_OFFSET=150,则当找到参考点后,当前位置即为150。按照以上的思路,大家可以进而学习了解RP寻找模式3和4的其他运动轨迹。在实际的应用中,为了确定参考点的位置,通常在数控机床的坐标轴上配置一个参考点行程开关。数控机床在开机后,首先要寻找参考点行程开关,在找到参考点行程开关之后,在寻找与参考点行程开关距离最近的一个零脉冲作为该坐标的参考点,根据参考点就可以确定机床的原点了。读到这里,相信您对EM253定位功能又有了一些新的认识吧。我们这里仅仅抛砖引玉,希望对您的学习和使用能有一点点的帮助。上一页 [1] [2]
本文关键字:西门子 西门子plc应用,plc技术 - plc应用 - 西门子plc应用






