利用弹性变形驱动物体, 实现微小位移, 也是目前微机器人领域研究的一种方法。
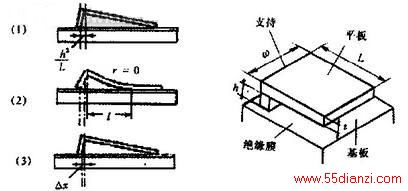
1997 年,日本爱知工业大学的早川和明等研制了基于弹性变形的微小移动机构[5 ] 。这种Scratch Drive Actuator (SDA) 利用L 字形平板在周期电压下的弹性变形, 驱动机器人本体前进。
SDA 的模式图及移动机构如图4 所示。硅板的弹性变形生成的弹性势能,驱动机构向前移动。SDA 的变形量为Δx 是:

弹性变形法的特点是结构简单, 极易小型化。现在已经制作出大小只有数十微米平方, 高度数微米的微型机构。由于SDA 的制作及控制简单易行,可适用于许多领域。
1. 5 碰撞驱动法
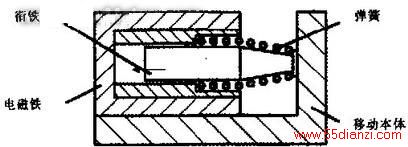
中科院沈阳自动化所提出了碰撞法。如图5 所示。质量为m 的物体(衔铁) 受磁力(或其它力) 作用,沿箭头方向运动,以一定速度与质量为M 的物体碰撞之后,物体M 得到一定的速度,使得M 与m 一齐移动。根据动量守恒和能量守恒原理可以得到如下移动方程:
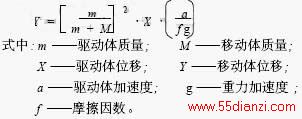
图5 碰撞驱动原理模型
理论上讲, 该方法质量比为二次项, 有可能比冲击法进给精度更高。但是,其可控性还有待进一步验证。
1. 6 足式驱动法
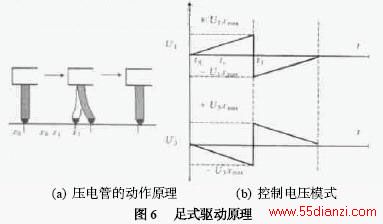
德国卡尔斯鲁大学提出了足式驱动微机器人的构想,并利用该方法做出了实验原型。目前, 他们已在一个综合微机器人开发项目MINIMAN 中应用了这一原理,取得了满意的实验效果。足式驱动的原理如图6 。
机器人微动平台是由三个压电陶瓷腿驱动。压电陶瓷呈管状,当施加电压时长度发生变化。每个管内、外分别镀有金属电极。它们是用于给压电管施加电压,来改变压电管的长度的。由于电场的变化,压电管或伸长或收缩。为了使压电陶瓷弯曲,外电极分成4 部分,沿轴向成90°分布,如图7 所示。
运动的过程是以压电陶瓷的速度为基础的, 应用了slip -stick 驱动原理。首先, 压电管慢慢弯曲, 然后快速移动一步。由于机器人平台的惯性和管的高速度, 它们在玻璃平板上滑行。
因红宝石球和玻璃之间的摩擦力比机器人的质量小得多,平台拉回一点。但与步长相比可以忽略。压电管到一个新位置时再一次伸展,这一步就完成了。
与机械摩擦式驱动相比,足式驱动方法更能发挥微机器人的灵活性,每一个驱动器都可以在平面内任意方向运动, 不需要组合。其运动平稳,并能同时实现快速的移动(粗动) 和高精度的微操作(微动) 。微机器人定位准确,可控性好,而且不需要机械导轨,移动范围不受限制。
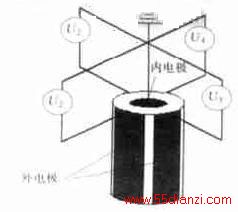
图7 压电陶瓷管驱动器
( c) ( d)
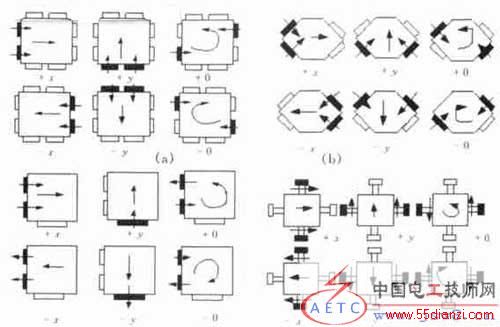
图8 全方位微移动平台原理图
2 平面全方位运动的实现从上述分析可知,改变足式驱动原理的压电管不同电极的外加电压,可以使驱动器沿任一方向运动,因而机器人具有高度灵活性。机械摩擦式动作原理通常只能实现线性移动,要实现平面全方位的灵活运动,还必须对上面的结构加以组合。这里以冲击驱动法为例,给出了几种具体的组合方式,如图8所示。
当驱动器只能单向运动时,用8 个驱动器组合可以得到一个对称的平面全方位运动平台,其结构布局如图8a 所示。这种结构的特点是运行稳定,没有耦合现象。显而易见,由于使用的驱动器数量多,使这种结构很难小型化。
一个简化的模型如图8b 所示,驱动器数目减少到了4 个。在使用压电元件驱动的情况下,由于运动是双向的,最少可以用3 个驱动器实现全方位运动,如图8c 所示。
图8d 显示的是另一种平台,它是利用4 个双压电晶体驱动,这里,急剧弯曲代替急剧伸长,实现了驱动效果。
3 驱动方法的改进
事实上,在研究中,人们并不拘泥于某一种方法,而是从实际出发,根据需要将多种方法进行综合,并加以改进。
将多个压电陶瓷并联实现尺蠖驱动,可以扩大微动机器人的行程,已经被用于STM 和精密工作台。利用冲击驱动方法,以一个压电元件驱动的双向自走机构,被用于细胞操作。平滑冲击驱动(SIDM) 机构 ,具有与冲击驱动法一样的自走
功能之外,同时还可实现高速度的粗动和高精度的微动。坂野哲朗提出摩擦驱动方法,使用两个相同的带有积层型压电陶瓷的驱动体,由压电陶瓷的微小变形产生的压力作用在夹持机构上,使之与导轨间的产生摩擦,驱动机器人前进。
为适应在生物医疗技术对微机器人的需要,Koji Ikuta 提出将冲击驱动法与电磁夹紧机构结合的可控微型线性移动机器人的设想 。与常规固定摩擦的冲击相比,这种摩擦可控的冲击驱动方法可实现四种驱动状态:释放、锁定(又称夹紧) 、增强和减弱。该系统可以通过滑动来消除过大的力,因而系统提高了操作者和机构的安全性,这是该系统与其它系统最大的不同之处。这种可控的机器人体积小、质量轻(力/ 质量达到70) 、速度高(达到35 mm/ s) 和效率高,并且运行安全、无噪声。
本文关键字:机器人 电工文摘,电工技术 - 电工文摘






