一、CAN闭环网络控制系统
随着控制系统趋于复杂化,对于一个独立的闭环控制系统,受控对象和控制器一般都会分布在网络的不同部分,一个典型的CAN总线闭环网络控制系统如图1所示。
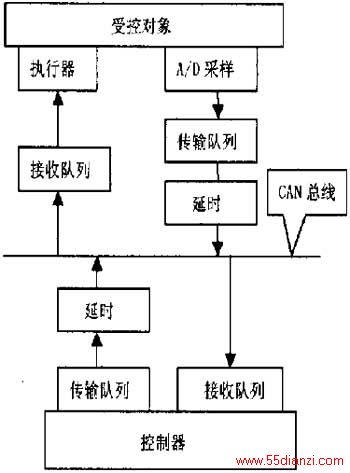
图1 典型的闭环网络控制系统(NCS)
相对于传统的闭环控制系统,在设计闭环网络控制系统(NCS)时,需要考虑一个新的限制:通信网络的带宽限制,影响网络带宽的性能有四种因素:
采样速率,各设备按此速率向网络发送信息;
需要同步操作的元件数;
信息的数据或报文长度;
控制信息传输的协议。
对于NCS,一般要求满足两个主要指标:延时的限定和传输的保证,即信息必须在限定的时间内成功地被传输。失败的传输或从传感器到执行元器件大量的延时信息将影响系统性能或使之不稳定。
下面我们将在对CAN总线控制网络的时域特性的分析基础上,提出一些减少网络时延和提高网络带宽利用率的方法。
二、CAN网络的时域分析
CAN协议转为短报文而优化,并使用报文优先权仲裁介质访问方法。具有较高优先权的报文在仲裁时总能得到介质的访问权,所以较高优先级报文的传输延时总可以被保证。与其他网络相比,CAN的主要缺点在于较低的数据速率。因为CAN网络为位同步总线。CAN的最大速率为1Mbps,同样限制了网络的最大长度。
这里将用研究时域参数的方法描述CAN控制网络的延时情况。对于图1的NCS,控制系统的总时延为TdeIay,包括采样信号从传感器送出到控制输出信号到达执行器的延迟时间。具体可分为采样信号在发送缓冲中的延时TsampdeIayl,采样信号的传输延时Tseddelayl,采样信号在控制器接收缓冲中的延时TsampdeIay2,控制器的运算延时Tmcu,控制输出信号在控制器发送缓冲中的等待时间TcondeIayl,控制信号的传输延时TseddeIay2,控制信号在执行器的接收队列中的等待延时TCOndelay2。
总的时间延时可以用一下等式清楚的表达:
Tdelay=TsampdeIayl+TseddeIayl+TsanpdeIay2+Tmcu+TcOn・deIayl+TseddeIay2+TcondeIay2 (1)
=(TsampdeIayl+Tsampdelay2+TcondeIayl+Tcondelay2)+(TseddeIayl+Tseddelay2)+Tmcu (2)
随着DSP等高速器件的应用,Tmcu相对于其他变量可以忽略,故上式可为≈Twalt+Tsend(3)。
这里Twalt看作排队时间,Tsend看作发送时间。
对于排队时间Tsend将取决于网络协议,并且是控制网络确定性的一个主要作用。具体取决于数据长度,引导位,填充和位时间。设Ndala为数据字节长度,Nhead为引导位字节长度,Nstu什为填充为字节数,比特位长度为Tb_l(约为1us),则发送时间为Tsend=(Ndata+Nhead+Nstuff)8Tb.t(4)。
分析表明:由于信息的发送时问(Tsend)是由协议本身决定的。要提高系统的实时性必须减少网络中信息的等待时间(TWait)。所以我们将从减少网络的信息量和均衡网络负载两方面来提高系统的实时性。
三、多率采样
在对CAN总线闭环控制网络的时延进行分析后,要减少控制系统的时延应该首先尽量减少网络中的信息传递任务,其次,在网络带宽一定的前提下,均衡网路负载以提高网络带宽的利用率。
对于NCS,由于节点分散化,不太可能也不太实际将所有的物理信号采用单一的速率进行采样。通常,采样器和保持器的采样时间越短,系统得到的性能就越好。但A/D,D/A转换器越快,其成本就越高。对于具有不同频率的信号的系统,既能达到较好的性能又能使系统成本较低的一种好的方法就是A/D,D/A转换器采用不同的速率。因此,多率采样是NCS自然的选择"。在分布式系统中采样一般是采用时间驱动的A/D,D/A转换器,尽管这种采样方式很适合于许多单回路的控制系统,但是对于多率采样系统来说,采用同步(时间触发)的采样方式常常会出现很多的问题,如网络带宽的限制使系统对信号的要求更高,过多的冗余信号将使系统中的延时、空采样、报文丢失变得更加严重,从而使系统的性能恶化。为了处理网络带宽的限制以及消除冗余信号对系统性能的负面影响,常常采用同步(时间触发)和异步(事件驱动)相结合的采样方式。
当数字控制系统中各采样器或保持器以不同的采样周期进行工作时,就构成了多率采样控制系统。根据多率采样数字控制系统中各个采样器或保持器是否同步和各采样周期之间的关系,可以将多率采样数字控制系统进一步分类。
如果系统的各采样器,保持器和各微机的计算都在同一的时钟下同步进行,再根据各采样周期之间的关系,同步系统可分为:输入多率采样控制系统、输出多率采样控制系统和广义多率采样控制系统。
如果系统的各采样器,保持器和各微机的计算不在同一的时钟下同步进行,再根据各采样周期之间的关系,非同步系统可分为:输入多率采样控制系统、输出多率采样控制系统和广义多率采样控制系统。
传统的理论和工程实践基本局限于同步多率采样控制系统,对于非同步多率采样数字控制系统的研究比较复杂,通常都是采用随机的方法来进行分析,假定局限于同步多率采样控制系统,对于非同步多率采样数字控制系统的研究比较复杂,通常都是采用随机的方法来进行分析,假定个采样器和保持器的采样时间是一随机过程,然后利用随机系统的方法来进行。

图2 数字控制系统
四、动态时间窗
为了均衡网络的负载提高网络利用率,结合CAN自身的特点,在一个CAN网络中,我们可以设定一个具有系统控制功能的节点,这里可以叫它为主节点(它区别于其他节点的是它的属性优先级最高),其他的叫从节点。我们设计一个网络系统,它包括:时间触发系统和事件触发系统。前者针对的是时间触发信息而后者针对的是事件触发信息。那么怎样去区分这两者呢?对于时间触发信息认为它是相对于自然界是一个同步系统;而事件触发信息定义它为相对于自然界是个异步系统。一般情况事件触发通信的效率要比时间触发效率高,但在考虑到最坏情况时,这种效率是无法估计的。由于事件触发相对于自然界是异步的,所以,当所有事件同时发生时,对它是个最坏情况。为了解决这种问题,往往需要足够多的资源(例如:通信带宽)。而对于时间触发通信,它往往相对于自然界是个同步过程,它可以在所要完成控制的环境下,提前决定时隙以控制最大轮回时间。它最重要的一个特点是我们可以根据网络上不同的信息流传输情况进行状态相关控制。可以对不同的信息流设置不同的状态,以使减少在同一时间等待发送的信息,这种状态相关控制会提高网络的利用率。
为了能使这两种系统之间不耦合,我们引入了动态时间窗(DTW)的概念。在一个DTW中,又包含两个子窗:异步窗(AW)和同步窗(SW)。异步窗用于收发事件触发消息,同步窗用于收发时间触发消息。由于事件触发消息一般比较少且到来具有随机性,而且一般要求及时相应,则在系统时间窗中,异步窗在前同步窗在后,且我们提出了最大异步窗的概念,争取最大限度地及时响应事件触发消息和防止系统网络灾难。如下为一个STW的结构。
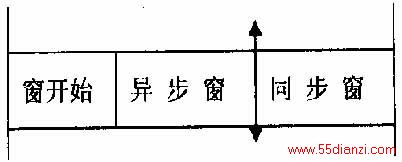
图3 单位时间冒
这里,令窗开始的时间为Tm,异步窗的时间为Ta,同步窗的时间为Ts,总的系统窗时间为Tc,而其中的双向箭头为一个QOS指针机制,它的滑动可以界定异步窗和同步窗的时间。
为什么要设定QOS指针呢?因为由于事件触发信息相对于时间是个异步系统而且具有随机性,整个网络的事件触发服务请求量是个动态变化的。当网络中的事件信息比较少时,可以移动QOS指针,使异步窗缩短;相反,当网络中的事件信息较多时,通过移动QOS指针使异步窗伸长,但却有个极限值。这样,就可以有效地利用网络带宽。
本文关键字:网络 电工文摘,电工技术 - 电工文摘






