2.5 软起动
SOFTSTART(19脚)上电压设定电流限制门限电平。ML4435有一个11V电源电压的内部分压器,见图5。分压器由两只225kΩ电阻组成,它把电流限制门限电平设定在055V左右。可用外部分压器或外部基准来取代SOFTSTART的设置,其电流大于内部分压器10倍。可在该脚对地接一只电容器,作功率上升时电流限制的软斜升。可用图6选择斜升时间。
图5 19脚 的 软 起 动 功 能
图6 软 起 动 斜 升 时 间 与 软 起 动 电 容 关 系
2.6 RSENSE
RSENSE提供与电机电流成比例的电压,作电流限制。RSENSE端的失效闭锁电压是0.6V,它由SOFTSTART(19脚)设定。电流传感电阻应是低电感的,例如碳膜电阻。用线绕mΩ级的电阻,应尽力降低电感。其额定功率正比于功耗Imax2RSENSE。
2.7 ISENSE滤波器
ISENSE输入端(1脚)需要接一个RC低通滤波器,以消除电流传感信号前沿的尖峰电压,它由二极管反向恢复时的穿透电流引起。若无该滤波器会出现电流限制的虚假触发。此电路推荐的标准值R=1kΩ,C=1000pF,可滤除窄于1μs的尖峰干扰。电容值不宜超过3300pF。滤波前后的波形见图7。
图7 ISENSE滤 波 波 形
2.8 逐个脉冲式电流限制
当ISENSE脚电压超过SOFTSTART脚电压时,电流限制电路被激活,它在PWM周期的剩余阶段关闭驱动器LA、LB和LC。
2.9 换向控制
一台三相直流无刷电机需要电子换向,以实现旋转运动。电子换向要求开通和关断三相半桥式功率开关。为了让转矩实现单一方向,由转子的位置给出换向指令。要实现ML4435的电子换向,是通过适当时序来开通和关断一相低输出L和另一相高输出H。总共存在六种L和H输出组合(即六种开关状态),如表3标出的状态A~状态F,它们构成一个完整的换向循环周期。这一开关时序被编程在图8所示的换向状态机中,该换向状态机的时钟是由VCO的输出提供。
表3 6种换向控制状态 6种状态 输出驱动器 LA LB LC HA HB HC A 低 低 高 低 HIGH 高 B 低 低 高 高 低 高 C 高 低 低 高 低 高 D 高 低 低 高 高 低 E 低 高 低 高 高 低 F 低 高 低 低 高 高
图8 换 向 状 态 机
2. 10 压 控 振 荡 器
VCO在TACH(2脚 ) 输 出 一TTL兼 容 的 时 钟 脉表示驱动器导通冲 , 它 正 比 于SPEED FB( 18脚 ) 输 入 电 压 。 频 率 与 电 压 或 与 VCO常 数 KV的 比 例 , 由 图 9中 的 RVCO( 4脚 ) 接 地 电 阻 和 CVCO( 20脚 ) 接 地 电 容 器 来 设 定 。
图9 VCO控制
RVCO设定的电流正比于VCO输入电压SPEEDFB减去0.7V。该电流用于门限电压在2~3.75V之间对CVCO充电和放电,见图9。RVCO限制在0.2V较低电压。这导致CVCO的三角波形对应于TACH脚时钟,也见图9。当VCO的输入等于或稍小于6V时,KV被设定在VCO输出频率对应于最大换向频率fmax,即对应于最大电机速度。CVCO和RVCO可由首次计算的fmax值来选择:
fmax=0.05×nmax×N
2.11 TACH
TACH(2脚)输出VCO频率,它6倍于换向频率。当电机在最低转速时(即SPEEDFB低于097V),TACH输出还表示因TTL停留在高电平而使电机处于低转速。
2.12 反电势取样器电路
输入到VCO的SPEEDFB(18脚)受反电势取样器控制。反电势传感脚FBA、FBB、FBC输入到反电势取样器,需要来自电机各相引线的信号,该信号低于ML4435的VCC值。相位传感的输入阻抗是8.7kΩ。如果电机电压大于ML4435的VCC值,则需要串接电阻RFB到电机各相引线,见图10。RFB可从图11曲线选择或利用下式算出:
RFB=8.7kΩ(VMOTOR/12-1)
图10 反 电 势 取 样 器 电 路
图11 RFB与VMOTOR(max) 相 应 关 系
反电势取样器把电机各相电压分压为低于VCC=12V(正常值)的信号电压,并由下述方程式计算电机的中性点电压:
VNEUTRAL=(VFBA+VFBB+VFBC)/3。
这就允许ML4435能比较反电势信号与电机中性点,而不需要从Y接绕组的电机中引出一信号线。对△接绕组的电机,因不存在物理中点,故必须计算该基准参考点。
反电势取样器所获电机相位,是未被驱动时的值:也就是如果LA和HB均导通,那么相位A被驱动为低电平,相位B被驱动为高电平,相位C则被取样。被取样相位提供一个反电势信号,它对照电机的中性点作比较。取样器受换向状态机器控制。取样的反电势经一个误差放大器与中性点比较。误差放大器的输出端送出充电或放电电流到SPEEDFB(18脚),它向VCO提供电压。
2.13 反电势传感的锁相环换向控制
由换向状态机、VCO、反电势取样器三者构成一个锁相环路,以使换向时钟自动跟踪反电势信号。完整的锁相环路见图12。该锁相环需要一个超前—滞 后 滤 波 器 , 它 由SPEED FB(18脚 ) 外 部 元 件 来 设 置 。
图12 PLL锁相环路
2.14 电机的起动
当电源首先加到ML4435时,电机处于静止,故反电势等于零。电机需要转动,以使反电势取样器自动跟踪电机位置,并使电机换向。ML4435用最低的VCO频率开始使电机换向。该低频换向由RVCO上的02V箝位设定,这就提供一为fmax/30的换向频率。
2.15 转动状态
在反电势传感后,PLL自动跟踪电机位置,电机则按闭合环路控制转动。在这一点上,速度控制环应迫使电机速度相应于SPEEDSET电压设置的速度。
2.16 PWM速度控制
速度控制是由在SPEEDSET(5脚)设置的速度指令来完成的,该脚输入电压为0.2~6V。速度指令的精度由外部元件RVCO和CVCO确定。控制ML4435的速度指令有几种方法:其一是用一电位器接在RT与地之间,而将滑动触头接在SPEEDSET。若用微处理器控制5脚,则可用RT作数模转换器(DAC)输入基准。RT电压应经缓冲器接外部电路。经跨导误差放大器,速度指令与比SPEEDFB(18脚)低07V的传感速度相比较。速度误差放大器的输出端是SPEEDCOMP(3脚),它被箝位在8.2~2.2V之间。82V信号与全PWM占空比相对应,而22V则对应0%占空比。速度环路补偿元件接该脚,见图13。可用下式来计算补偿元件:
CSC2=![]()
RSC=![]()
CSC1=10×CSC2
式中:freq是速度环路的带宽(Hz)。
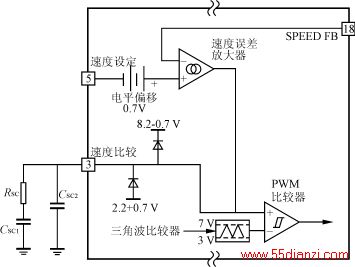
图13 PWM振 荡 器 电 路
图13中3脚电压与三角波振荡器比较,产生一PWM占空比。PWM振荡器产生一个3~7V的三角波函数,而三角波振荡器频率由RT(6脚)的接地电阻设定。RT可由图14曲线来选择。来自速度控制环的PWM占空比,选通逐个脉冲式电流限制电路,以控制输出驱动器LA、LB、LC。
上一篇:便携式仪表电源的设计






