���������Ϸ������Եó����½���:
����(1) ��ѵ�ѹ��Kuop ��綯�������ʱ�ĺ���ֲ��й�, һ���첽�綯����
[PN(1/��N �C 1) - P0]> ( P0 - P��) ,���� > 1 ,Ҳ����˵�����ʱͭ�Ĵ�������,�綯�����������������С״̬.
����(2) ���綯����������ʱ,����ѵ�ѹ��Kuop=4�̦�ʱ,����ֵ���ܴ���1. 1.
����(3) ֻ�е�����ϵ����<1/�̦�ʱ,���͵�ѹ���нڵ�����,�Ҹ���ϵ����ԽС,��ѹ�ڵ�Ч��Խ��.
����(4) �����ʱ������Խ�ӽ�ͭ�ĵ��첽�綯��,���ý�ѹ�ڵ��Ч��Խ��.
����4 �����ܿ��������ܿ��Ʋ���
����4. 1 ���첽�綯�����ܿ���������˼��
�������ڸ�����ͺź����칤�յIJ��,�����ܽ���Ƚ�ȷ�еġ�ͳһ����ѧ����ʽ. �Ҵ�ͳ���첽�綯�����ܿ��Ʒ�ʽ����,���˼·����[4] . Ӧ���Ƚ���ģ�����Ƽ���,���Խ����һ����,������ķ�ʽ,��ʵ�õķ���,�����۵ijɱ�,ͨ�����������ջ�����,ȡ�����Ч�Ľ��ܹ�Ч. ���,������Ƶ�ģ������ϵͳ����˫���뵥����Ľṹ,ʵ����һ����.
����ģ�����ܿ�����Ҫ��Ϊ��ѹ�͵�Ƶ���ֽ��ܿ���,������Ҫ�о�ģ����ѹ���ܿ���,ֻ������ʱ�漰����Ƶ����. ģ�����Ƶļ���Ӧ�û��ڴ�����ר�Ҿ������������. ��ģ����ѹ���ܿ������Ǹ��ݹ������������Ӷ˵�ѹ�ı仯�����ڴ����Ǧ��Ĵ�С�ﵽ��ѹ����Ŀ��. �������������ƻ�·�Ľ��߷�ʽ�dz����,�ڲ����˼�������ƺ�,��ʹ����ϵͳ�Ŀɿ��Ժ��Ա������������ǿ.
����4. 2 �����ܿ���������ϵͳ�ṹ
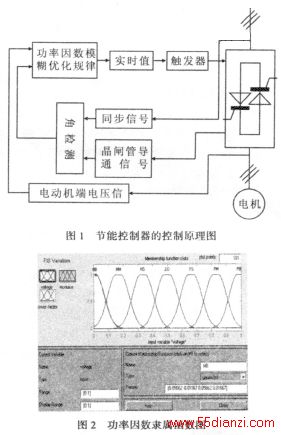
�����첽�綯�����ܿ������Ŀ���ϵͳԭ��ͼ��ͼ1 ��ʾ.

����������������·���÷�������բ����ص�ѹ.���ƻ�·�ɼ��Ĺ����������붨�Ӷ˵�ѹ��ɵıջ�����. ���ƹ�������:ͨ����ȡ�Ե��������ѹ��ͬ���źŹ�����,�����������������ľ�բ�ܵ�ͨ�ź���Ƚ��γɦս��ź�. ����������ֵcos�ռ����Ӷ˵�ѹ����ģ��������,�����ڿɵõ���բ�����ഥ���Ǧ�,�Ӷ��ﵽ���ڶ��Ӷ˵�ѹ,���ܽ��ĵ�Ŀ��.
����5 ���첽�綯�����ܿ������ķ���
�����첽������ܿ������ɵ�������������ʾ,����ģ��,�����������ģ��,�����˲���ģ��,ģ��������ģ���ģ�����.
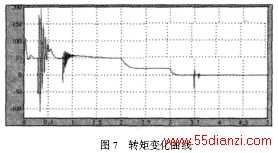
������Fuzzy control systemģ����,�������In1Ϊ��ѹϵ��(Voltage) ,�������In2Ϊ��������(Power factor) ,�������Out Ϊ�����ǵĴ�С(modulus) ,��������������Ϊ��˹����. ��Voltage ����Ϊ������������������ͼ,��ͼ2 ��ʾ,ģ����������۲�����ͼ3 ��ʾ.
�������������������:ѡ��ķ���ʱ��0s��5s ;�䲽���ⷨ��ode23t ;�����С����ѡ���Զ�;ѡ��ϸ���. ������ѹ���ܷ���Ĺ�������:
����(1) ���طּ���Ƶ���Ĺ���. 0s��0. 3s ,���ڶ����ϵ����ѹΪ50V ,Ƶ��Ϊ10Hz ;0. 3s��0.8s ���ڶ����ϵ����ѹΪ110V ,Ƶ��Ϊ25Hz ;
����(2) 0. 8s ����ڶ��������ѹ��Ƶ�ʲ��ٸı䱣�ֹ�Ƶ50Hz ,���Ƕ��ӵ�ѹ���渺���ʵı仯����. �����,��2s ʱ�������ʦ±仯Ϊ0. 4 ,3s ʱ��Ϊ����. ����û����������Ŀ���,�����ó���1 ����������ģ�����.
���������,A �ඨ��������������������綯�����ת�١�ת�صı仯�����ͼ4��ͼ7 ��ʾ.
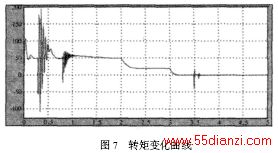
����ͨ��ͼ4��ͼ7 ��ʾ�ķ��������Կ���,�첽�綯���ּ���Ƶ��������ֻ��50A ����,��Ϊ�������2 ��;��ѹ������Ҫ����Ƶúܺ�;��ת����0. 02s ���ҵ�ʱ���ھͳ��������ת�ص�1. 2 ��,��0. 6s ���Ҿͻ����ȶ��ڶֵ,��ȫ������������Ҫ��;�����첽�綯����������,�����ʱ��������ֵ�ͱȽϸ�.
����6 ���ᡡ��
�����ý��ܿ���ϵͳ�ľ��м���Ժ�ǿ³����,�������Զ����ٸ��ر仯ȡ�ýϺõĽ���Ч��. ��ϵͳ����������ɶ����,���ڹ����ں��ḻ,�����������,���н�ǿ����Ӧ����.
��һƪ������ѹ���ϻ���ϼ���






