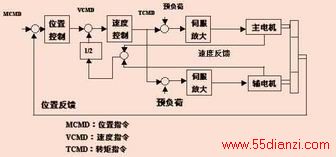
图7 串联控制原理
预加负荷与间隙的消除
一般来说,具有大齿轮降速比的机械,总存在机械间隙量。为了减少主、辅轴间的间隙,经常采用预加负荷的方法减少间隙。FANUC数控系统在串联控制时,可以加一个固定的预负荷到主、辅电机的转矩指令上。那麽相反方向的转矩可以一直维持主、辅电机的张力。在串联控制时,预加负荷可以很容易去除齿轮、齿条这样的机构主轴与辅轴间的间隙。不过这种预负荷并不能降低滚珠丝杆和工作台间的间隙。如图8所示,当预加负荷的机械在加速、减速时,主、辅电机产生相同方向的转矩,串联控制系统工作在负荷均分的工作方式,像图8的2和3;
图8 预负荷的功能
当它在常速运行的情况,系统的工作取决於摩擦力与预负荷的情况,工作在负荷均分或者反间隙的工作方式。在预负荷大於摩擦力时,工作在反间隙的状态;在摩擦力大於预负荷时,工作在负荷均分的状态;当系统的进给停止时,这时预负荷在主、辅轴间产生张力,系统工作在反间隙的工作方式。根据上面的分析,可以合理选择预负荷的特性而保证在传动过程中消除间隙。
应用
上文已说明,多电机可采用同步轴和串联轴虚拟为一个数控坐标轴;那么什么情况下采用同步轴?什麽情况采用串联轴呢?串联控制主要用在下列场合:
一个驱动电机转矩不够,可用两个较小的驱动电机代替;
两个较小的驱动电机的惯量和比一个较大的驱动电机小;
机械是否具有“反施”(back feed)的能力,或者能否被称为具有“互为主、辅轴”的性能,简易判定的方法如下:先定两个轴中的一个轴为“主轴”,另一轴为“辅轴”,用手转动“主轴”,“辅轴”也跟着转,反过来,用手转动“辅”轴,“主”轴也转,那麽该机械系统就具有“反施”功能。具有“反施”性能的就采用串行控制,如果不具有这个性能就采用同步控制。
本文关键字:数控 电工文摘,电工技术 - 电工文摘






