


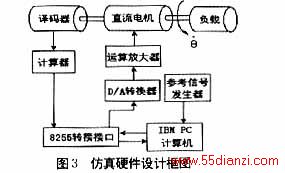
已知带负载和传动装置的直流电机的参数如下:J=0.0143kgm2,B=0.9385Nm,比例-积分控制器的参数Kp=4和KI=2,死区宽度不被预知,其初始估计值为d+=d-=0。在加与不加死区补偿的条件下,我们利用比例-积分控制器对直流电机的非线性死区动态响应进行仿真,选择的参考信号为正弦信号。图4,图5给出了基于模糊控制的直流电机死区补偿器的仿真结果,(a)图显示了死区宽度的估计值,(b)图显示了在正弦信号下的仿真曲线,其中,曲线1表示参考信号,曲线2表示在没有死区补偿的情况下,直流电机的角速度输出信号的动态响应,曲线3表示有死区补偿的情况下,直流电机的角速度输出信号的动态响应。
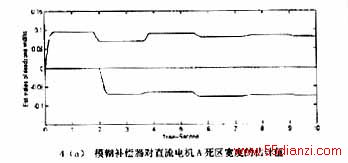

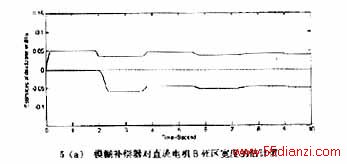
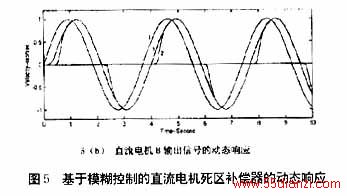
从图中不难看出,对于死区宽度未知的不同直流电机A和B,本文设计的基于模糊控制的直流电机死区补偿器均能准确估计出其死区宽度并进行补偿,如图4仿真估计出直流电机A的死区宽度d+=0.08,d-=-0.075;图5仿真估计出直流电机B的死区宽度d+=0.04,d-=-0.05,仿真结果表明跟踪误差很小,设计方案行之有效。
基于模糊控制的直流电机死区补偿器的设计是一种较新的研究方向。由于直流电机模型本身就具有很强的非线性,因而给设计带来了相当大的难度。本文通过对模糊逻辑系统的函数近似特性及量化等级特性的应用,在模糊死区补偿器的设计方面做了一定的探索性工作,并取得了良好的控制效果。
6参考文献
[1]W.LI and X.CHENG,“Adaptive high_precision control of POSTTTIONing tables-Theory and experiment”[J].IEEE Trans.Contr.Syst.Techol,1994,2(9):265-270
[2]V.I.UTKIN.“Sliding mode control design principles and applications to electric drives”[J].IEEE Trans.Ind.Electon,1993,40(2):23-36
[3]TAO and P.V.KOKOTOVIC,“Adaptive control of systems with unknown deadzones”[C].in Proc.Amer.Contr.Conf.,Chicago,IL,1993:2710-2714
[4]M.TIAN and G.TAO,“Adaptive3 control of a class of nonlinear systems with unknown deadxones”[C].in Proc.IFAC World Conress,San Francisco,CA,1996:209-214
[5]诸静模糊控制理论与应用[M].北京:机械工业出版社,2001,(6):405-419,2001,6
[6]肖建现代控制系统综合与设计[M].北京:中国铁道出版社,2002,(2):291-302






