• 最小速度,S1
• 定叶尖速比模式中的最大速度,S4
• 高约定速度(S5)的速度设置点。它可能与S4 相同。
• 最高稳态运行速度。它通常与S5 相同。
• 高于额定值的扭矩设置点,QR。 定义恒定尖速比曲线BG 的参数Kλ ,或一个查验表。
3.3 动态参数
为了与测算控制回路的动态特性,必须规定速度传感器和桨距传感器的动态响应,以及控制器的实际算法,该算法用来计算响应测得的转速信号的桨距和发电机扭矩需要量。图 3.3 显示了用于产生桨距和扭矩需要量的控制回路。在额定值以下扭矩需要量回路有效,反之则桨距需要量回路有效。
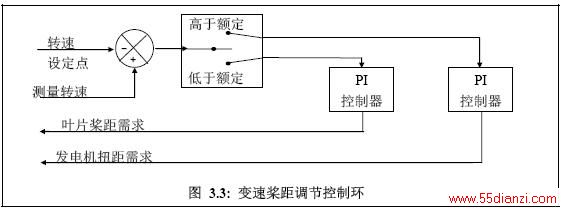
低余额定值时,速度设置点在S1 与S4 之间切换。在低风速情况下,该点在S1, 而扭矩需要量输出被限定在一个最大值上,该最大值由最佳叶尖速比曲线BG 给出。这使得运行点循着轨迹ABG 移动。高风速情况下,设置点变到S4, 而扭矩需要量输出被限定到一个最小值上,该最小值也由最佳叶尖速比曲线给出,同时使运行点循着轨迹BGH 移动, 并导致QR 的最大值。当达到H 点时,随着桨距控制回路在速度超过S5 时变为有效,扭矩保持恒定。
结论与展望
这里简单的对直驱型发电机组变桨控制模型进行探讨。此控制模型在直驱式风力发电机组概念设计中的一部分。
由于直驱式发电机组在我国目前还没有形成大规模的产业化。我们对直驱型的风机设计还在不断的进行探讨和摸索当中。同时还要通过长期的试验和收集数据,对模型进行细化、修正和完善。姜兴华金风科技股份有限公司
主要参考文献目录
1. 金风62/1200 风力发电机组介绍,金风公司产品资料,2005 年.
2. John F.Walker & Nicholas Jenkins ,风能技术,JOHN WILLEY & SONs,1997
3. balded for WINOOWs 原理手册,1996
上一篇:仪器仪表的智能网络化技术






