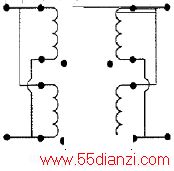
如图7所示,通用步进电机有8根引线。它既可配置为单极性也可配置为双极性步进电机。在分辨这类步进电机的绕组时可能使用户产生某些困惑,因为需要掌握正确的绕组极性以及顺序。通常,仅仅依靠观察是无法确定绕组的极性的,可以通过电子测量的方法来推断它。
1.分辨通用步进电机绕组的极性:
为了测量和确定通用步进电机的绕组极性,需要一个电源或电池组,以及一块数字万用表。请遵循以下步骤进行:
①首先,使用数字万用表的欧姆档找出4个引线对,从而确定4个绕组。
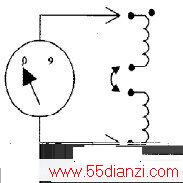
②选择两个绕组,并各选一条引线相互短接。将数字万用表切换到AC电压的20v档,将数字万用表的两个表笔连接到正在测量的两个绕组的末端。
③转电机轴,如果得到2v左右的电压读数,那么就找到了同一组的绕组,也就确定了它们的极性参见图8。如果万用表的读数是0V,同样也确定了绕组的极性,它们的极性相f参见图9。切换到绕组的另一根引线并短接到另一绕组,以验证前面的假设。
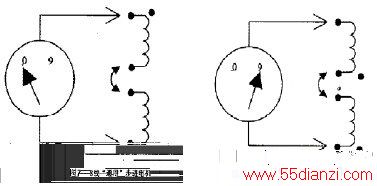
④标注引线以指示绕组的极性。至于哪一端定为上述图示中所标示的记号黑点端并不重要,只要你知道如何分组即可。
2.配置通用步进电机极性的方法:
配置通用步进电机极性的三种方式:单极性、双极性串联和双极性并联。
图10所示的配置模拟了一个6绕组的单极性步进电机。
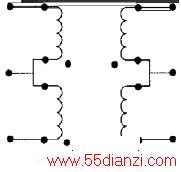
图11所示的双极性配置可以以较低的工作频率传递较高的力矩。它的工作频率无法较高,是因为串联绕组具有高的磁阻,因此电流无法快速达到峰值。
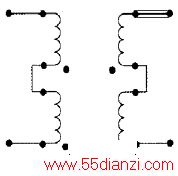
图12所示的双极性并联配置步进电机的输出力矩小于双极性串联配置,但是它具有更高的工作频率,因为并联绕组配置具有低磁阻,电流可以快速达到峰值。