为了使BLDC电机速度可变,必须在绕组的两端加可变电压。
利用PWM控制技术,通过控制PWM信号的不同占空比,则绕组上平均电压可以被控制,从而控制电机转速。
在控制系统中采用DSP或单片机时,可利用器件中的PWM产生模块产生PWM波形。
根据转速要求设定占空比,然后输出6路PWM信号,加到6个功率管上。
以dsPIC30F2010单片机为例:
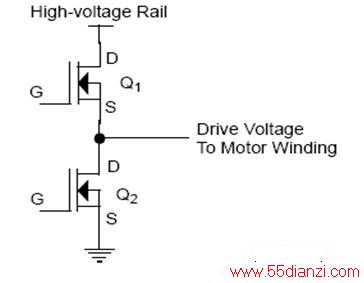
当下桥臂的功率管由导通到关断时,上桥臂的功率管延时一段时间再由关断到导通,以防止桥臂直通。
这个延时时间称为”死区”。
死区可通过编程改变。
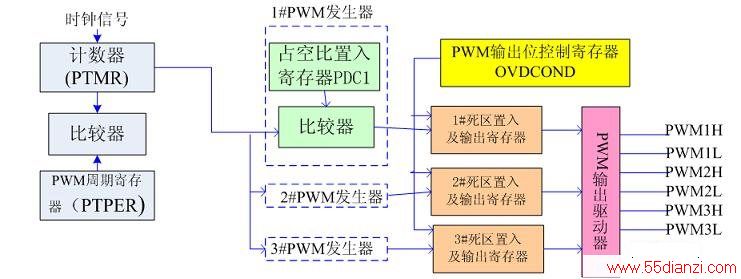
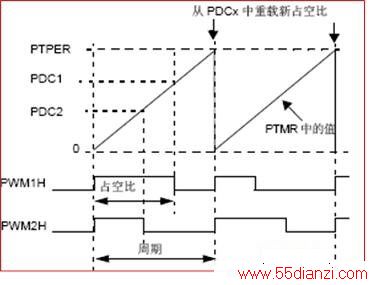
MCPWM的PWM时基模块中有一个专用的16位PTMR计数器和一个PTPER 数字寄存器,PTMR对定时时钟计数,PTPER中置入的数字确定了PWM信号的周期。PTMR计数器启动计数后,其计数值与PTPER中置入的数字值比较,两者一致时,就输出一个周期的PWM信号。改变PTPER的值,就可以方便的改变计数的周期,这样就可以改变PWM波形的频率。
PWM 发生器#中PDC数字寄存器中置入的数字确定了PWM信号的占空比。比较器将设定的比较值PDC*:与PTMR计数值相比较,产生PWM波形的跳变。只要实时改变比较器的值,就可以改变单位周期内高电平或者低电平的脉冲宽度,产生占空比可调的PWM波形。
通过占空比比较产生的三个输出将被分别传输给死区置入及输出寄存器,可以在高电平变低与低电平变高之间插入一段死区。以防止输出驱动器发生意外的直通现象。
特殊函数寄存器OVDCOND中的各位 直接控制6个PWM输出通道。当位为1时,已建立的占空比信号出现在该位所对应的输出通道上,当位为0时,其输出被禁止。
OVDCOND寄存器的值由霍尔传感器输出的二进制编码绕组通电顺序决定。
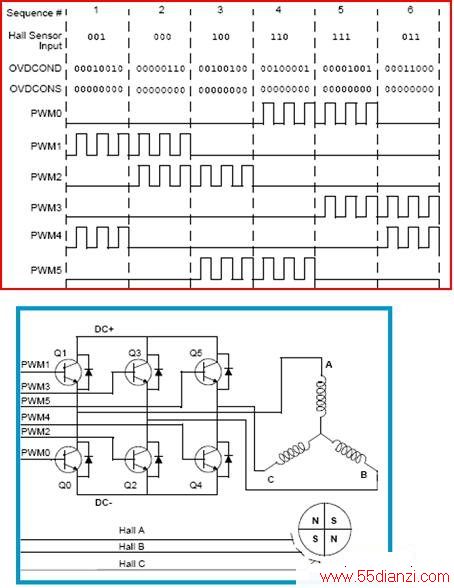
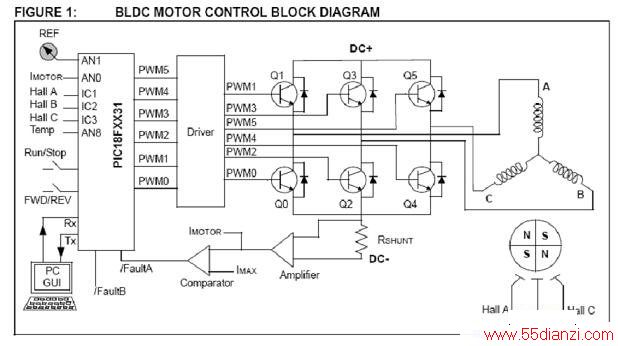
例1 由单片机控制的BLDC系统:
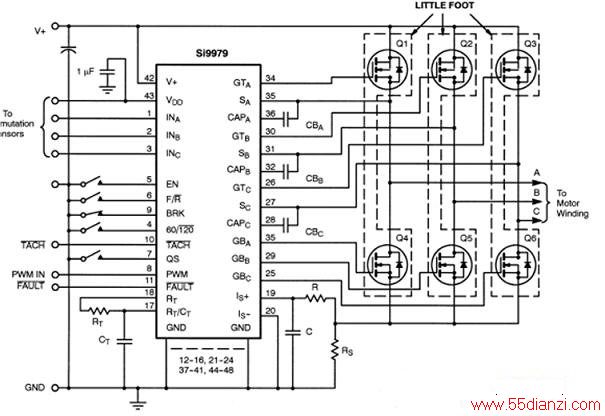
例2 单片三相无刷直流电动机控制器SI9979
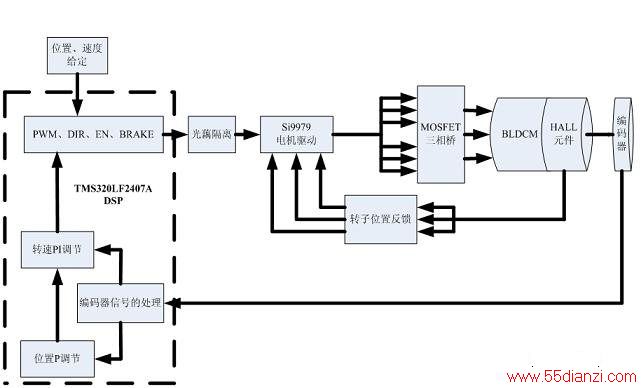
例3: 由DSP控制的BLDC系统
上一篇:简易的单相电机调速电路






