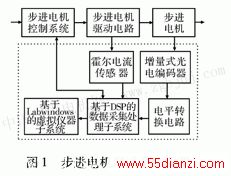
1 系统概述 步进电机测试系统以增量式光电编码器和霍尔电流传感器作为检测元件,采用DSP处理器(TMS320lF2407 A)和虚拟仪器(Labwindows/CVI)完成数据的采集、处理和显示,实现了对步进电机运动性能和工作电流的精确检测。系统组成框图如图1所示。
2 基于DSP的数据采集处理子系统
基于DSP的数据采集处理子系统主要由DSP最小系统、增量式光电编码器、霍尔电流传感器、信号调理电路、电平转换电路和串行通讯接口电路组成,主要完成对步进电机角度、电流参数的采集处理及与上位机的串行通讯功能。数据采集处理子系统如图2所示。

2.1 DSP最小系统
DSP最小系统主要完成对步进电机角度和电流信号的采集、处理以及与上位机的串行通讯任务,电路如图3所示。
数据采集处理子系统选用TMS320LF2407A作为中央处理器。将TMS320F2407 A应用于本系统的优越性在于:
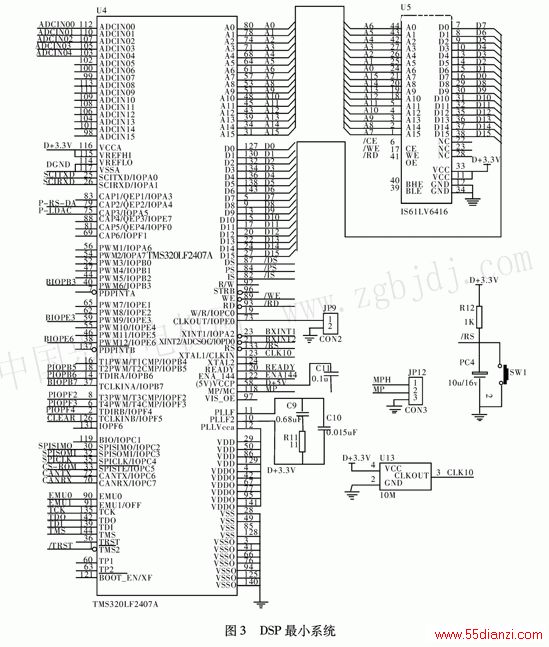
(1)指令执行速度达到40 MIPS,几乎所有的指令都可以在一个25 ns单周期内完成,可以极大地提高系统的响应速度;(2)片内集成正交编码脉冲电路(QEP),接收来自光电编码器的两路互差90°的脉冲信号,输出步进电机旋转方向信号和与编码器输出脉冲同频率的脉冲信号,作为DSP定向增减计数器的计数方向控制信号和计数脉冲信号;(3)片内集成的1 6位通用定时器TX具有定向增减计数模式,可以方便地记录步进电机正反两个方向的角度数据;(4)片内集成1 6通道十位.A/D转换器,可对步进电机四相电流信号进行实时采样,而不必外接单独的A/D转换芯片;可见,采用DSP作为系统的控制器简化了系统的硬件设计,提高了系统的可靠性和响应速度。
2.2传感器选用
(1)增量式光电编码器选用高精度增量式光电编码器2RH9000一D—08一S作为角度敏感元件,其最大角度分辨率为O.04 o o(2)霍尔电流传感器选用霍尔电流传感器HNC一03 SY。作为电机的工作电流测量元件。其线性测量范围±4.5 A.,输出电压范围±4 V±O.8%,线性度±O.25%,响应时间小于1μS。
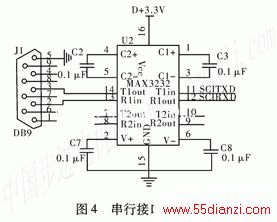
2.3 串行通讯接口电路
采用RS一2 3 2通讯接口芯片MAX3 23 2实现DSP与上位机的串行通讯接口,电路如图4所示。
3 基于Labwindows/CVI的虚拟仪器子系统
基于Labwindows/CVI的虚拟仪器子系统通过PC机的RS一232接口接收来自DSP处理器的步进电机角度和电流数据,并根据相应算法对电机的运动位置、单步相应、步距角精度和工作电机进行计算、显示和存储。
4 实验结果
通过对DSP和虚拟仪器子系统的优化设计,测试系统实现了对步进电机运动位置、单步响应、步距角精度和工作电流的检测功能。试验结果如图5~图8 所示
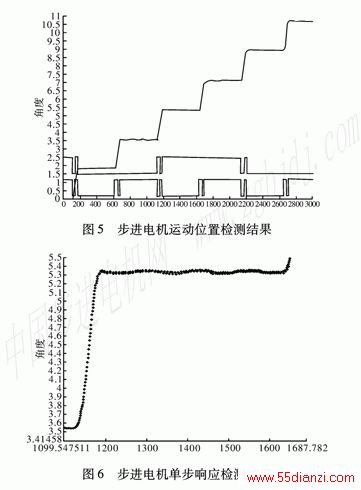
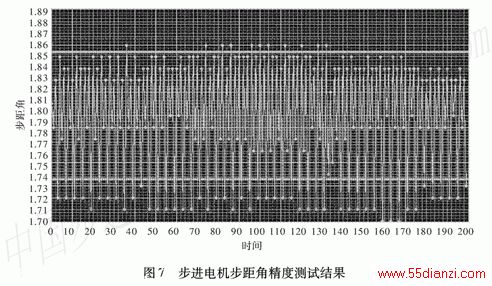
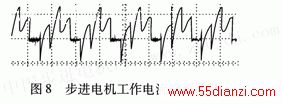
试验结果表明,基于DSP和虚拟仪器技术的步进电机测试系统能够有效地完成对步进电机的运动位置、单步响应、步距角精度和工作电流等参数的精确检测,角度分辨率达到O.04。,电流分辨率达到O.1 A。系统工作协调可靠,人机界面良好,满足了步进电机的测试需求。






