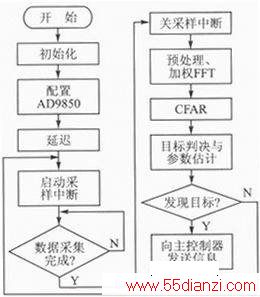
DSP开机上电复位后,初始化自身的配置,使得系统进入预定的工作状态;在正常工作状态模式下,按照AD9850的参考协议(本文采用的是串行3线制)配置寄存器,产生所需要的正弦调频信号,然后延迟等待;
直到雷达探测器高频部分工作稳定后,DSP启动采样中断,按照设定的周期控制A/D采集数据,直到I、Q两路分别采集完成1 024点数据(一帧),DSP关闭采样中断,然后数据进行处理完成动目标检测过程。首先DSP对采集的I、Q两路数据进行预处理,接着利用海明窗函数进行
加权并完成复数FFT运算,对运算结果做恒虚警率处理(CFAR),计算出恒虚警门限值,然后进行目标判决得出有无目标的结论。
若发现目标,则将目标的速度、运动方向、信号相对强度送至主控制器,最后重新启动数据采样,进入下一次运算。
结语
本文采用DSP十MCU+CPLD方式实现的控制与信号处理机已经成功应用于某型号FM—CW雷达探测器上,具有成本低、性能较高且应用灵活等特点。该系统也可以应用于其他领域窄带信号的处理,具有较好的通用性。
本文关键字:探测器 仪器仪表读写器,电子知识资料 - 仪器仪表读写器
上一篇:数字转速表电路






