本文在分析了目前几种比较主流的光伏电池最大功率点跟踪(MPPT)算法的基础上提出了一种新的光伏电池MPPT算法。利用PIC16F877单片机构建的最小系统控制的Buck电路,实现了新算法的实验验证,新算法较大地提高了MPPT控制器的性价比。同时,这里还提出了一种新的基于IR2110构建的单管高边功率NMOSFET驱动电路,提高了变换器的变换效率。
近年来,随着地球上化石能源不断被人类开采并消耗,石油可用储量不断减少,太阳能光伏电池系统作为可控性强,利用率高,并储存方便的一种对太阳能进行利用的方式,为人类解决日益严重的能源和环境危机提供了一个很好的发展方向。
然而,目前光伏电池的太阳能转化率还不高,对其商业化形成了巨大的阻力。故提高光伏电池的转化率是推动光伏电池产业和解决能源危机的主要途径。从光伏电池材料和制造工艺角度提高光伏电池的转化率是做法之一。此外,还可通过光伏电池控制器,利用MPPT技术,使光伏电池输出功率达到最大。目前为达到良好的动态特性,研究出的光伏MPPT方法很多,但通过控制器提高转化率的前提条件是控制器的性价比要合理,据此,从实际应用的角度出发,通过引入新的MPPT算法,以有限的硬件条件实现了光伏电池的最大功率输出。
2 MPPT算法思想
2.1 MPPT算法的基本原理
图1示出光伏电池阵列的电路原理图。
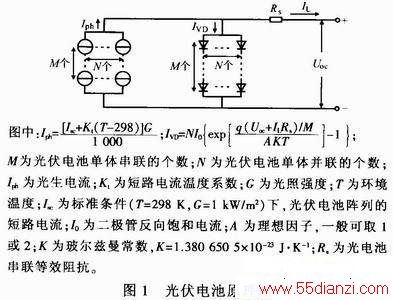
显然,流经等效二极管的电流IVD随光伏电池阵列输出电压Uoc增大而增大,且增大到二极管的导通阈值电压时,Iph大部分从等效二极管分流,从而使输出电流IL较小,所以设计MPPT控制器的思想是通过控制器将Uoc钳制在等效二极管完全导通之前的某一电压值,使光伏电池的实际输出功率是当前光照和环境温度条件下的最大功率。
2.2 传统MPPT算法
恒电压法是最早的一种MPPT控制方法,不同光照强度下,光伏电池阵列的最大输出功率点(MPP)的电压近似相等。利用这一特性,将光伏电池输出电压固定在此电压上,实现光伏电池的最大功率输出。此方法无法较准确地实现MPPT控制。
扰动观察法,即爬山法,是一种比较实用的MPPT控制算法,这种方式虽在一定程度上减轻了CPU的负担,但由于周期性寻优,会对系统的输出电压造成周期性的波动。
电导增量法是目前跟踪MPP快速而准确的算法之一,但其缺点是:对硬件的要求非常高,特别是要求模拟信号的数字化转换精确而快速,且必须要对信号做高质量的滤波处理,否则无法实现找到MPP的功能。此外还有同扰动观察法一样占用CPU时间太多的缺点。
2.3 新MPPT算法一过山车法
过山车法是针对传统算法占用CPU时间过多,或对硬件要求过高的缺点提出的,对于中小功率的太阳能光伏系统而言,此算法性价比较高。由于该算法是在Buck电路实验平台上发展起来的,故该算法适用的主要范围是负载端的阻抗比光伏电池MPP处的等效阻抗小的情况。
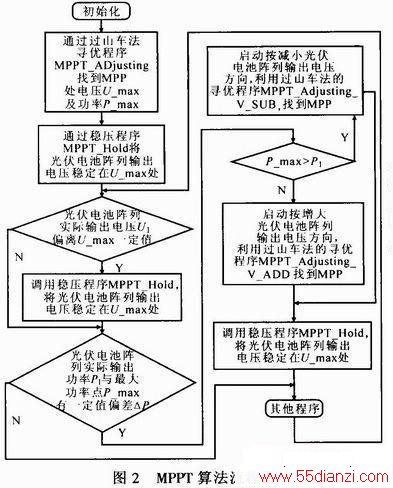
该算法基本思想是:①利用过山车法,即先将光伏电池阵列两端电压U1钳制在蓄电池电压U2处,再逐渐增加U1,使光伏电池阵列的输出功率点由小到大,经过MPP后,继续增大U2,使输出功率比最大输出功率小于一个阈值△P1。输出功率由小变大,再变小,一定会经过一个最大点。在输出功率变化过程中,记录下光伏电池阵列输出最大功率时的输出电压U_max;②根据光伏电池阵列输出最大功率时记录下的U_ max,利用稳压程序(可利用PID控制)将U1钳制在记录下的U_max上,实现光伏电池阵列以最大功率稳定地输出能量;③当光照强度发生变化(由于在短时间内,环境温度的变化对系统输出功率的变化影响不大,可以忽略),即输出电压U_max时的输出功率P1与之前的P_max之间差值超过一定阈值△P时,若P1>P_max,说明光照强度增加了,MPP处的输出电压也相应增大了,所以此时应启动按增加光伏电池阵列输出电压的方向用过山车法寻找MPP程序;如果P1<P_max,说明光照强度减小了,MPP处的输出电压也相应减小,故此时应启动按减小光伏电池阵列输出电压的方向用过山车法寻找MPP程序。整个程序的流程图如图2所示。
3 单管高边NMOSFET驱动电路
为保证硬件电路的稳定性,实验采用IR2110芯片,搭建所需单管高边NMOSFET驱动电路,如图3所示。图中A,B两点分别接被驱动的NMOS FET的栅极和源极。驱动电路基本工作机制是:①PWM为低电平时,HIN为低电平,HO与VS导通,VQ1,VQ3先后关断,LIN为高电平,LO与VCC导通,LO变为高电平,VQ2导通,将升压电容C1的负极端接地,此时,直流电压源12 V通过二极管VD1给C1充电;②PWM为高电平时,LO与COM导通,LO变为低电平,VQ2关断,而HO与VB导通,这使得C1的正负极直接连接在VQ3的栅极和源极上,VQ3导通,导致C1的正负极通过VQ3连接在被驱动MOSFET VQ1的栅极和源极上,使VQ1导通。需要注意的是,即使由于VQ1导通导致B点的电压升高,由于C1的作用,A,B两点之间的电压保持不变,保证了主电路NMOSFET的持续导通。
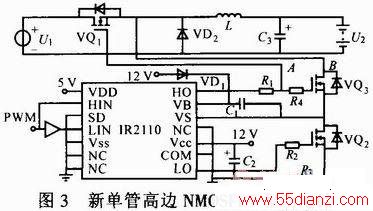
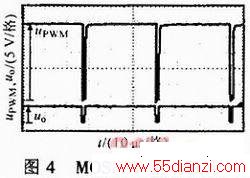
经实测A,B两点间的PWM波占空比范围能达到0~96%,图4为A,B两点间的PWM波形(占空比为96%),uo为PWM模块输出信号,uPWM为经驱动电路后用于驱动MOSFET的PWM信号。
利用IR2110搭建传统Buck驱动电路,如图5所示。该驱动电路是用VD3和R2实现将C1的负极接地,从而完成VQ1关断期间对C1的充电。由于C2及容性负载(如蓄电池)的两端有电压U2,使B点出现对地大小为U2的电势,导致C1两端电压近似为零而无法给C1充电,故需在B点至C2及容性负载正极之间加一个VD3,使得在VQ3关断期间,将B点与C2及容性负载正极之间断开,再通过R2与地等电势,间接地将C1负极接地,实现对C1充电。
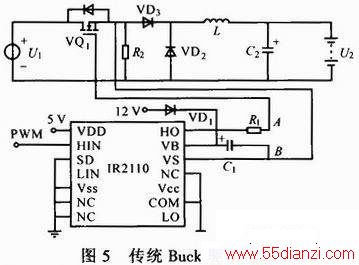
比较图3,5可知,图5中主电路上多R2和VD3,假设Buck后端负载电压U1=14 V,负载电流I=5 A,前端电压U2≈U1/D,D为占空比,VD3导通电压Uf=1 V,那么消耗在R2和VD3的能量为:
![]()
新驱动电路中,多出的两个MOSFET会增加能耗,其能耗分为两部分:①给栅源极电容充放电消耗的能量为:P2_1=2QgUgsf,Qg为VQ2或VQ3的总栅极电荷,Ugs为VQ2或VQ3栅源端电压,f为VQ2,VQ3开关频率。这里VQ1选用L2203N,VQ2,VQ3均选用IRF640。从IRF640 Datasheet中可查得Qg=72 nC,且选择Ugs=12 V,f=30 kHz,故P2_1=0.025 92W。
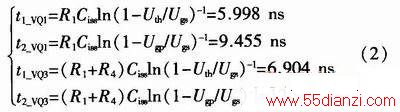
②漏源极之间的导通与关断消耗的能量。由于VQ2的通断是为C1充放电(而C1为VQ1栅源电容充放电),VQ3的通断是为VQ1栅源电容充放电,从L2203N Datasheet中可查得VQ1的总栅极电荷Q1g=60 nC,C1在一个周期中因给VQ1栅源电容充电而导致C1的电压下降△u1=Q1g/C1=6 mV,可见C1两端电压变化很小,所以VQ2通断前后,VQ2漏源极两端电压很小(为毫伏级),可视作ZVS软开关,那么VQ2通断造成的能量损耗几乎能忽略不计。而VQ3关断时,VQ1先关断,VQ1的栅源极电势相等,而VQ1的栅极、源极分别跟VQ3的漏极、源极等电势,那么VQ3的漏源极两端电压也近似为零,可见,VQ3关断时也可视为ZVS软开关,所以VQ3的关断造成的能量也可忽略不计;VQ3导通时,栅极电压变化过程如图6所示。

图中,Uth为开启阈值电压,Ugp为米勒平台电压,UCC为MOSFET稳定导通后栅源极两端电压。对于VQ1,VQ3,通过查阅相关数据求取t1,t2:
本文关键字:电池 电池技术,电源动力技术 - 电池技术






