图8 对称崎岖地面云台伺服电机
角度调整值
通过以上实验结果,可知
(1) IMU得到的返回值准确反映了不同崎岖地面的机器人姿态特征。如图7可以看出,对称地面运动时车体俯仰角度随地形变化明显,显示出明显的规律性,车体横滚角和偏航角较小;而从图10可以看出,机器人开始运动后,先向左侧横滚,然后随地形起伏向右侧横滚,显示出规律性,与机器人运行情况实际情况基本一致。俯仰角与偏航角较小。角度偏差是因为轮子滑转和驱动轮直流电机不平稳的瞬态响应造成。
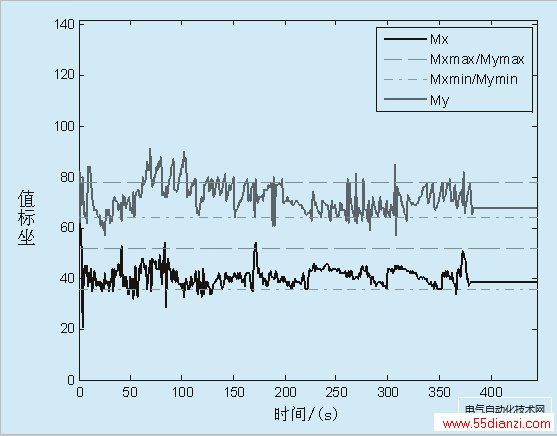
图9 称崎岖地面的目标中心坐标值
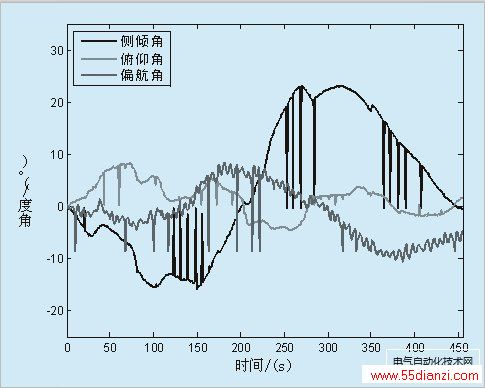
图10 非对称崎岖地面IMU值
(2) 随着机器人运动,俯仰角随着地形逐渐增大(减小),摄像头瞄准开始偏离目标,此时或值偏离出中心矩形框,车载计算机能根据跟踪控制方法即时判断,计算电机调整角度,控制云台伺服电机运动重新瞄准。
(3) 无论移动机器人在何种地形下运动,由视觉系统返回的Mx和My值能始终保持在图像平面的中心矩形框内,表明摄像头成功瞄准目标中心,证明所提出的跟踪控制方法简洁有效。






