内容摘要:本文采用STM32F103RBT6芯片设计并实现了一款小型化桌面型的贴片机。首先介绍了贴片机的结构及各个模块的组成,分析了其中运动控制系统模块的硬件组成、软件设计方案,对核心电路部分、舵机的驱动程序以及串口通讯数据包的设计做了详细的介绍。经过调试,该设计方案能够较为准确和高效的完成自动贴片工作。
贴片机又称“表面贴装系统”(Surface Mount System),是一种通过移动、吸取、安放动作把表贴元件精准放置在指定位置的一种自动化设备。在实际生产线中,先由点胶机对PCB板进行点胶操作,然后由贴片机进行贴装操作,最后由回流焊机焊接,完成整个PCB板的焊接任务,是SMT流水线中不可或缺的一环。目前发达国家垄断了贴片机的主要领域,我国的贴片机产业完全靠进口。而且在实际生产中,国际上的自动贴片机虽然效率与精度最高,但大都造价昂贵,功能单一,适用于大型企业。而手动贴片机造价低廉,但效率极低,精度取决于操作者得水平,且无法解放双手。
本文以STM32F103RBT6为主控芯片,设计了一种适应于个体经营者、学校实验以及科研制板等领域的自动贴片机,既能解放双手,增加效率,又能不失精度,价格适中。
1 贴片机模块设计方案
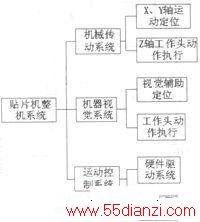
本文将贴片机模块化的进行设计与编程,模块化后的整机系统由3个部分组成:机械传动系统、机器视觉系统和运动控制系统,如图1所示。
1.1 贴片机机械传动系统的设计方案
1.1.1 贴片机X轴Y轴设计方案
本方案采用X—Y轴两轴联动,Z轴独立运动的设计方案。其中X-Y轴由步进电机通过同步带传动进行机械运动。具体实现结构如图2所示。
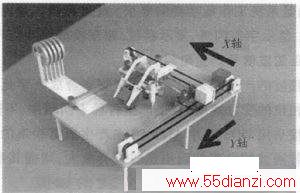
如图所示,Y轴步进电机固定于底座上,带动同步带轮旋转,同步轮带动同步带做直线运动,光轴滑块与同步带相连。从而跟随同步带演光轴导轨做Y轴方向的的运动。X轴整体机构与Y轴相似,提供X轴方向上的直线运动。其整体固定与Y轴滑块之上,当Y轴运动时同时带动X轴运动。从而实现X—Y两轴联动。
1.1.2 贴片机Z轴设计方案
本设计方案中Z轴由舵机、光轴导轨、吸笔、拖拽针、摄像头组成。其结构如图3所示。
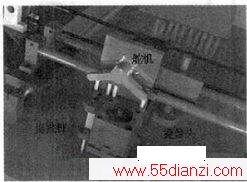
其中吸笔由空心轴步进电机制作而成,当步进电机旋转时,带动吸笔吸盘选择,从而提供了贴片机旋转轴的运动。旋转吸笔用于改变元器件贴装方向。拖拽针与吸笔固定在同一直线上,用于拖拽料盘,从而实现送料功能。拖拽针与吸笔分别固定在2组光轴导轨上,底部安装有弹簧,用于拖拽针与吸笔复位。舵机控制压杆左右旋转,从而压动吸笔与拖拽针进行向下运动,当压杆处于中间态时,弹簧将吸笔与拖拽针
弹起,回到初始位置。摄像头安装在工作台上方,用于俯视PCB板。
1.2 机器视觉系统设计方案
本方案采用两台CCD相机、环形LED光源及图像处理设备组成。其中一台CCD相机安装在贴片机Z轴上。与贴装头一起运动,用于俯视PCB板,采集各定位点坐标信息,计算X—Y轴运动偏移量,辅助定位。另外一台CCD相机固定在工作台上,向上仰视。当贴装头吸取原件后,运动至相机上方,相机采集元器件图像。计算旋转角度偏移量及X—Y轴运动偏移量。环形LED光源提供相机采集图像时的背光,提高成像质量。计算机用于处理采集到的图像数据,分析计算后将控制指令传送至运动控制系统。
1.3 运动控制系统设计方案
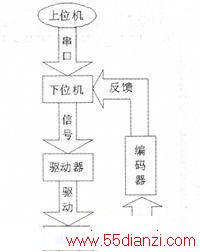
运动控制部分由软件系统与硬件设备组成。其中软件部分分为上位机及下位机。上位机即计算机。下位机采用STM32F103RBT6微控制器作为核心控制器。上位机与下位机由串口数据线连接。硬件设备由步进电机、步进电机驱动器、舵机、电磁阀等组成。
运动控制系统工作流程如图4所示。
2 运动控制系统硬件设计
2.1 运动控制系统结构
贴片机控制系统模块所完成的主要任务是,在上层控制器的控制下,对步进电机驱动器进行控制,使各轴能够进行“受控运动”,实现运动控制系统所需求的各轴起制动、正反转、调速和保护等功能。
控制系统的控制模式是以PC机为平台、以微控制器为核心协调工作。通用PC机负责数控程序编辑、人机界面管理等功能;微控制器用来管理子程序以及负责机械本体的运动控制和逻辑控制,支持用户的开发和扩展,并具有上、下两级的开放性。
本设计方案采用STN32F103微控制器作为核心器件,协调3个步进电机驱动器控制步进电机的运行。同时获取编码器数据,限位开关状态,并控制舵机、电磁阀等器件的运行。各器件连接图如图5所示。
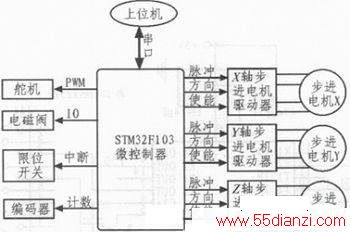
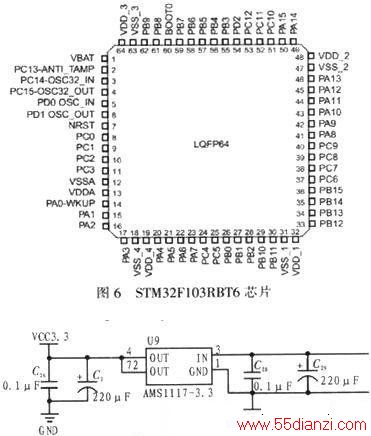
本设计方案所采用的主控芯片STM32F103RBT6是一款基于ARM Codex—M3内核的32位处理器,具有杰出的功耗控制与众多外设。该芯片内置128K FLASH、20K SRAM、2个SPI、3个串口、1个USB、1个CAN、2个12位的ADC、RTC、51个可用IO口。其电路图如图6所示。
2.2 电源电路
电源电路采用AMS1117—3.3作为电压转换芯片。AMS1117是一款正电压输出低压差的三端线性稳压电路,在输出1 A电流时,输入输出的电压差典型值为1.8 V,内部集成过热保护和限流电路,确保芯片和电源系统的稳定性。
该电路输入端与输出端各接1个0.1μF的非极性独石电容和1个220μF的极性电容。这两组电容起到了稳压滤波的作用。
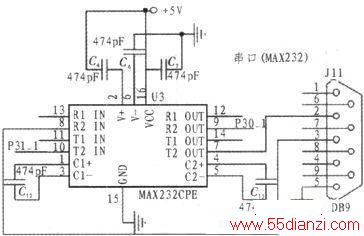
2.3 串口电平转换电路
串行接口是嵌入式系统中较为常用的一种接口。本系统采用RS-232总线于上位机进行通信,采用MAX232芯片来完成RS-232串行接口的电平转换。串口通信电路如图8所示。
2.4 步进电机驱动电路
步进电机必须有驱动器和控制器才能正常工作。驱动器的作用是对控制脉冲进行环形分配、功率放大,使步进电机绕组按一定顺序通电,控制电机转动。本设计采用DM442数字式步进电机驱动器。该驱动器可以设置512内的任意细分以及额定电流内的任意电流值,能够满足大多数场合的应用需要。电路连线如图9所示。
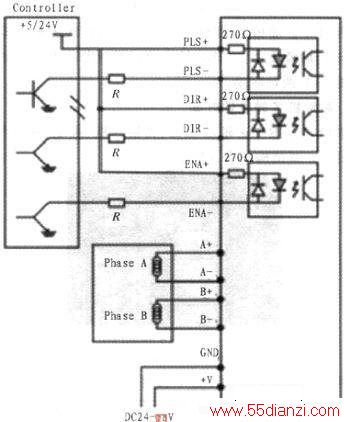
通过步进电机驱动器控制步进电机的方法较为简单,仅需通过单片机IO口给出不同频率的方波脉冲信号即可控制步进电机的速度,通过另一个IO口给出高低电平控制电机旋转方向。本文所采用的步进电机步距角为1.8°,因此驱动器每接收200个脉冲信号,步进电机旋转一周。
3 运动控制系统软件设计
下位机控制程序由串口收发程序,限位开关检测程序,舵机驱动程序、步进电机驱动等部分组成。下面将对舵机驱动和串口收发部分做详细的介绍。
3.1 舵机驱动程序






