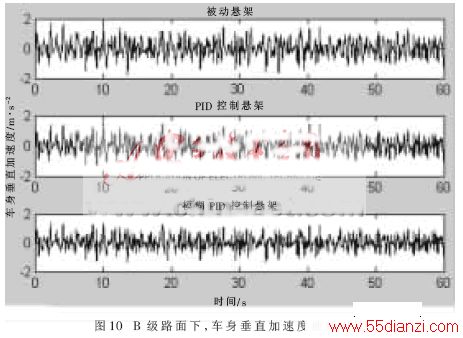
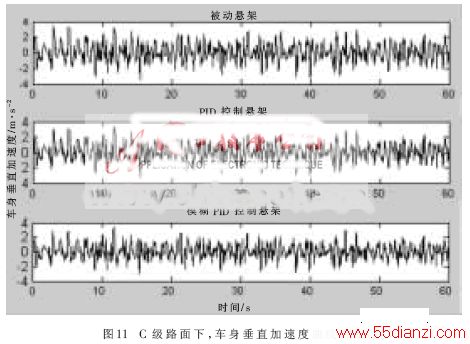


本文针对YBL6891H型客车,介绍了空气悬架电子控制单元的电路结构,并用MULTISIM 10对高度传感器检测电路进行了仿真。采用模糊PID控制算法对空气悬架进行控制,并对1/4悬架模型进行了仿真,结果说明,该算法能有效地降低车身垂直加速度,改善了车辆的行驶平顺性和操纵稳定性,在B级和C级路面上,模糊PID控制悬架的加速度均方根比被动悬架分别降低了23.4%和17.3%,动行程和车轮相对动载荷均方根也有所改善。实践证明,该电子控制悬架系统能满足系统的整体要求,达到良好的控制效果。对车身的侧倾角和俯仰角的控制是下一步要做的工作。
本文关键字:单片机 综合-其它,单片机-工控设备 - 综合-其它






