
图4 CAN 初始化流程图。
3. 2 CAN 子节点收发软件设计
子节点主要功能是实现对按键信号进行采集, 并响应主控节点命令, 通过CAN 总线向主控节点发送检测点信息。在软件设计上, 子节点采取命令应答方式, 即等待命令―分析命令类型―发回相应数据。
系统中子节点在上电复位后主要工作为:
( 1) 对系统进行初始化;( 2) 向主控节点发出加入请求;( 3) 主控节点接受请求, 并给该子节点一个网络编号;( 4) 等待主控节点命令;( 5) 根据命令将监测点的相关数据通过CAN 总线发送给主控节点。
因此, 子节点的主要流程如图5 所示。

图5 子节点流程图。
3. 3 主控节点软件设计
主控节点软件采用事件驱动方式, 事件信号由各种中断信号产生; CPU 在进入中断处理程序后, 仅仅判断事件类型, 设置相应的事件标志位, 并不对事件做任何处理; 主控节点主程序将循环读取事件标志, 并转入相应的事件处理程序。
主控节点具有两种工作模式。一种是系统中存在上位机, 上位机作为命令发出点, 主控节点处于被动控制模式。此时, 主控节点的工作是通过RS 232 接收上位机的命令, 分析命令的目的节点, 并将命令通过CAN网络发送给目的节点; 同时, 主控节点检测CAN 网络上的节点数据, 将节点发出的数据通过RS 232 发送给上位机; 重复以上流程直到工作方式发生改变。在这种方式下主控节点的主要工作流程如图6 所示。
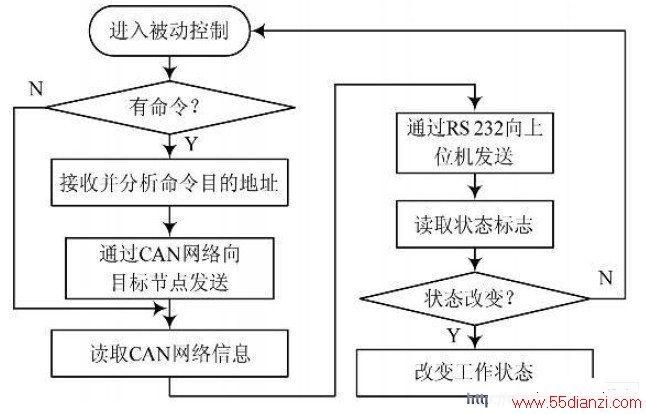
图6 被动控制状态流程。
当系统中不存在上位机或上位机发出脱离系统命令后, 主控节点进入主动控制工作模式。在这种状态中, 命令发送者为主控节点, 主控节点可通过定时器事件轮循查询各节点工作状态; 响应键盘事件, 并根据用户输入的命令向目标节点发出命令或响应相应子节点的数据; 通过LED 灯显示子节点工作状态。
两种工作模式间可以通过上位机发出命令、用户通过键盘输入命令以及主控节点查询上位机工作状态异常( 如在被动状态中, 上位机长时间没有命令) 等几种方式切换。
3. 4 上位机 监控系统 设计
上位机监控系统基于C+ + 设计, 可以实现同时对多路数据进行采集、存储, 并设计了图形化的监控显示。监控系统功能包括:
( 1) 向主控节点发出联机或脱机命令, 切换节点工作状态;( 2) 定时发送节点查询命令, 查询子节点工作状况, 更新系统节点表;( 3) 根据用户需要, 定时向监控节点发送读取命令, 取得节点的监控数据, 并保存数据, 形成监控数据文件;( 4) 以图形化的方式显示监控曲线。
上位机系统中还包含了数据分析功能, 其中设计了算法接口; 系统用户可编写自己的算法库, 系统可调用用户算法库对采集的原始数据进行进一步的分析。
4 结 语
由于CAN 总线具有极强的抗干扰能力, 系统在使用现场数据通讯非常可靠, 并且通过CAN 中继器 可以进一步提高通讯质量和距离。随着CAN 总线芯片性能的提高、价格的降低, 逐渐应用到普通轿车上, 也为其在农业机械上的应用提供了条件。研究CAN 总线在拖拉机等农业机械上的应用, 对于提高农机性能和经济性, 促进我国农业机械化发展, 具有重要意义。






