www.55dianzi.com
4 实验结果
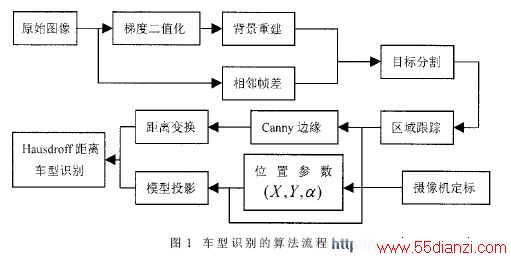
本实验所采用的352x288视频图像,来自采用单千固定CCD摄像机于杭州天目山路拍摄的交通场景片断。主要算法在Trimedial300 DSP上用C语言实现,在图像分割过程中进行了较多的梯度、降低噪声、填充和标记运算,平均处理一帧大约耗时0.3s。算法流程的全过程如图1所示。
实验证明,抽取背景和当前帧之间进行差异 检测 ,分割较为准确。对于比较淡的阴影,用梯度二值化方法可以部分消除阴影影响。由于只监视边缘变化部分,背景重
建速度比直接利用灰度图像重建背景快很多,干扰也较小。梯度二值化处理之后重建背景只需150-200帧,而不经过梯度二值化处理在上千帧之后仍然没有较好的背景,并且点状噪声和云雾状模糊比较严重。
跟踪计数的结果表明,利用形心和面积作为特征,可以快速跟踪图像序列中的目标,计数正确率可达95%。计数误差主要在于遮挡引起的分裂合并处理不能完全如实反映目标的运动,把合并区域当作新出现的区域。如果合并区域再次分裂,分裂出来的区域就会被当作新区域,造成计数偏大。为了简化跟踪算法,实验仅在相邻两帧之间进行跟踪匹配,这样处理分裂合并的能力并不强,如果在多帧之间进行跟踪,效果会好一些,但是算法比较复杂。
对于大小相差悬殊的 车辆 ,如公共汽车和轿车,根据长度、宽度信息就很容易分别开来,根本不用进行后面的模型匹配。所以本文试验主要针对了街道上常见的大小相差不太大的车辆,将它们分成了轿车、轻卡和面包车。试验证明:直接利用CANny边缘,根据Hausdorff距离匹配可以有效地对车型加以判别。由于没有逐条抽取边缘直线来与模型轮廓线匹配,计算量大为减小,算法实现简单。由于轿车的外形大小变化相对较小,识别正确率最高,可达90%;轻型卡车次之;面包车的识别率最低,大约50-60%,错误部分主要被识别成轿车,主要原因是面包车的大小相差很大,模型匹配方法的一个不足也在于此。要提高识别率,模型细分是必需的工作。本试验中摄像头安装在街道的前方,由于车辆最显著的外形特征在于侧轮廓,所以如果摄像头安装在街道旁边拍撼车辆的侧面图像,可以认为识别效果应该会更好一些:另外,Canny算子的边缘效果不是很好,噪声比较大,也影响了判决结果。如果采用Hough变换抽取车辆边缘的直线,计算量较大。如果阴影比较严重,还需要进行专门的去阴影处理。这些都是下一步工作要解决的问题。
参考文献1 Shao-Yi Chien,Shyh-Yih Ma,Liang-Gee Chen。EffICient,Moving Object Segmentation Algorithm Using Background Registration Technique.IEEE Trans.Circuits and SystEMS for Video Technology.2002;12(6):577-586
2 孙慧,张燕.计算机视觉摄像机定标中投影矩阵的计算.河北师范大学学报,2001;126(1):26-28
3 张嫣,姚耀文,唐华松.动图像序列中多目标跟踪的研究与实现.计算机应用研究,2002;(1):74-76
4 Gunilla Borgefors.Distance Transformations in DiSital Images.Computer Vision,Graphics,and lmage Processing,1986;34:344-371
5 杨枝灵.Visual C++数字图像获取处理及实践.北京:人民邮电出版社,2003
上一页 [1] [2]
本文关键字:检测 综合-其它,单片机-工控设备 - 综合-其它






