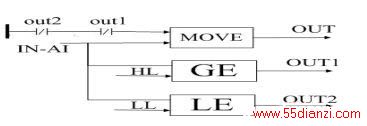
MOVE―移动保持指令(使能端EN=1,OUT=IN。EN=0,OUT保持前次值)
GE―大于等于指令(OUT=1,IF IN1≥IN2)
LE―小于等于指令(OUT=1,IF IN1≤IN2)
HL―上限设定值
LL―下限设定值
注释:当模拟量输入信号在HL和LL之间时,OUT=IN。当IN-AI信号超出或等于HL或LL时,GE或LE判断IN-AI信号,使OUT1或OUT2输出“1”去封锁MOVE,从而保持MOVE的输出为HL或LL的设定值。也就起到了限幅的作用。
优点:能有效克服因偶然因素引起的脉冲干扰。
缺点:平滑度差。
2、延迟滤波限幅法
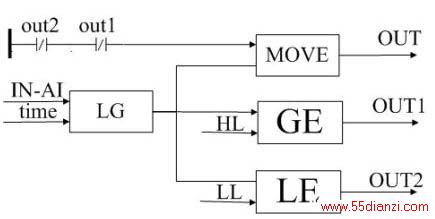
MOVE―移动保持指令(使能端EN=1,OUT=IN。EN=0,OUT保持前次值)
GE―大于等于指令(OUT=1,IF IN1≥IN2)
LE―小于等于指令(OUT=1,IF IN1≤IN2)
HL―上限设定值
LL―下限设定值
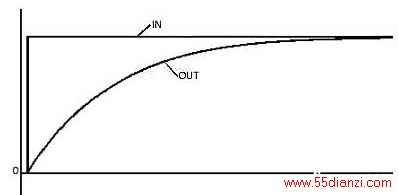
LG―延迟滤波指令(其曲线如下图)
TIME―延迟滤波时间
注释:功能基本和限幅法相同,只是在输入端增加了一个延迟滤波器,对输入信号起到了延迟缓冲的滤波。
优点:有效地抑制了周期性的脉冲干扰。平滑度比限幅法有所改善。
缺点:信号响应速度减缓。
3、延迟滤波比较法
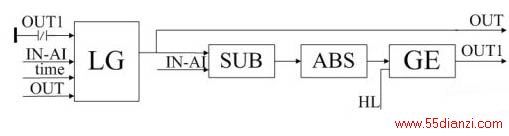
LG―延迟滤波器
SUB―减法指令
ABS―绝对值指令
GE―大于等于指令
HL―最大偏差值
TIME―延迟滤波时间
注释:正常情况输入信号IN-AI经过一阶延迟滤波后直接输出,OUT=IN-AI的值;当有突变信号时,输入信号IN-AI经过一阶延迟滤波后与含有突变信号的输入信号IN-AI相减取绝对值(无论出现正偏差还是负偏差),与HL值比较,若大于等于HL的预设值,OUT1=1,将LG―延迟滤波器切换成跟踪状态,此时OUT就保持了输入信号IN-AI突变前的值。直到突变信号减弱,OUT1=0,OUT=IN-AI。
优点:对周期性干扰具有良好的抑制作用。平滑度高。
缺点:灵敏度取决于TIME―延迟滤波时间的大小。
4、积分消抖滤波法
本文关键字:软件 PLC入门,plc技术 - PLC入门






