
MEMS陀螺仪(Gyro),微机电系统(MEMS)技术的飞速发展已经允许制造商在微型芯片上制造出完整的陀螺装置。MEMS陀螺仪背后的物理现象就是科里奥利效应(Coriolis)。如图3,微型块在旋转面上(ω),微型块m将前后振动,因此产生相同频率的垂直科里奥利力。这些力的幅度等于±2ωvm,并直接正比于整个系统的角速度ω。这些力将导致图3所示部件的物体从一边推向另一边,这些位移可以被检测为电容的变化。此时陀螺仪(Gyro)所需的就是用相关电路去检测电容的振荡,并将它转换为电压,再经整流后输出直流电压。这种电路的目的是将旋转速度转换为电压。MEMS陀螺仪(Gyro)产品最主要特色是整合了MEMS机械设计和制造、混合信号ASIC设计,以及晶圆级封装等技术,开发出兼具小尺寸、低成本与高效能的陀螺仪产品。
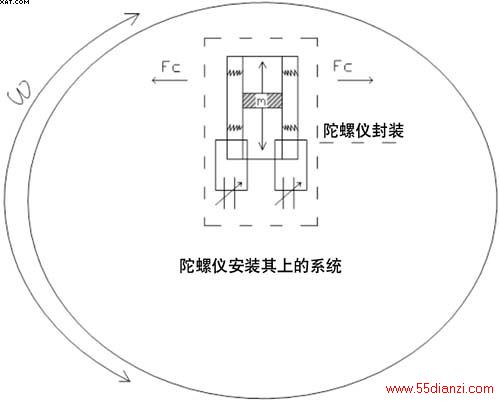
图3MEMS陀螺仪的实现
由图2看出,在3D图面上,Z轴有自动聚焦功能,Z轴移动对成像基本没有影响,有影响是在X轴(PITCH)与Y轴(YAW)。图4为在晚上拍照,无防手抖与有CCD防手抖的结果。图5为CCD防抖系统框架,CCD防抖是在镜头上增加CCD支架,利用步进马达对X轴,Y轴的驱动,使CCD移动来补偿CCD的抖动。MEMS陀螺仪选用要有X,Y轴Gyro芯片,内部含放大,低通,高通滤波,这样可以大大减少相机的尺寸。Gyro信号连DSP的ADport,DSP的AD是10bit,满足设计要求。资料运算用相机本身的DSP处理,可以减少一微处理器(Micro),降低成本。DSP对Gyro传来的ω信息进行运算,计算补偿量,通过马达驱动电路驱动X,Y移动来达到补偿的目的。X轴,Y轴的PI信号是Lens反馈DSP信息来校正CCD与Lens中心重合,避免补偿过程超出Lens设计的补偿范围。
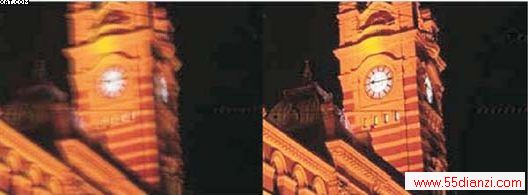
图4左边照片为没有打开防手抖,右边打开防手抖
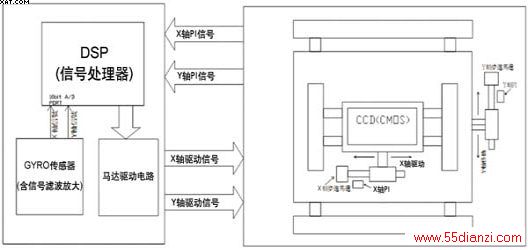
图5CCD防抖系统方块图
实验证明,一般人手持相机拍照时手抖频率0~20Hz(资料来源:日文版数字摄影杂志2006/12),DSP对GYRO取样频率设为500~1KHz能够满足系统的要求。图5为抖动的位移示意图,黑色为原来的位置,红色为偏移位置。
按Lens的spec可知步进马达每相的移动量(如1.44um)。由公式3可知GYRO感知角速度,就可以计算出CCD的偏移量。
d=f*sinθ------(1)
Whenθ<20°d=f*θ
θ=∫ωdt-----(2)
θ=Σωi*dt
→d=f*Σωi*dt-----(3)
d:偏移量f:焦距ω:角速度
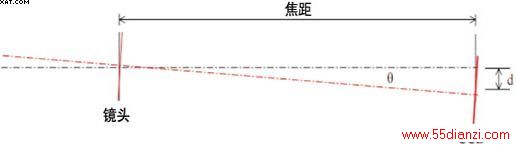
图6抖动光路的变化
CCD的防抖动系统采用PID自动控制系统(PID就是比例微积分调节),如图7,P(比例)控制是Gyro侦测的抖动按比例移动CCD,I(积分)控制是调节对时间积分误差,D(微分)是抑制误差产生的超前,如低频Powernoise补偿。通过调整PID参数,使系统稳定可靠运行,达到设计的目的。同时也要考虑部件对系统的影响,如Powernoise对Gyrosense造成的测试误差,步进马达能否达到要求的1000pps,Gyro的低通,高通滤波器等等。

图7PID方块图
CCD防抖技术可以克服手抖引起的图像模糊,但不是万能,目前业界补偿的标准也就是安全快门的2~3级,遇到长焦或快门时间过长,超过补偿极限时,带三脚架拍照才是最有效。
本文关键字:技术 数码相机 电子技术,电工技术 - 电子技术






