

计算取η=0.001,Tw=5.0s,k1=1.5, k2=40。
在动模试验中,PMU对PT、CT的幅值和角度误差进行了补偿,CT正常工作范围为额定值的0~30倍。为了测试算法的有效性,在如下两种扰动情况下进行试验:
扰动1:机组G1、G2间的联络线L5无故障断开后不再重合。
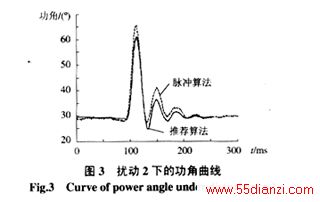
扰动2:母线5处发生三相瞬时短路故障,持续时间为0.21s。
试验结果如图2和图3,虚线代表脉冲法实测的功角,实线为本文算法得到的功角曲线。
从试验结果来看,在系统稳态和暂态过程后期,两种方法得到的结果吻合得很好,在扰动期间及其后一小段时间内,测量结果的差别稍大(如扰动2情况,最大达到6º),但两者的动态变化趋势是一致的。

5 结论
(1)测量算法的推导是基于同步发电机派克方程的,考虑了转子上d 轴含励磁(f)
绕组和阻尼(D) 绕组,以及q 轴两个阻尼(Q、K) 绕组;因此,方法适用于汽轮发电机和水轮发电机。
(2)方法利用发电机端电压、输出电流的交流采样值和部分参数来实现测量,不包括非电气传感器,故易于实现、通用性好、代价低。
(3)动模试验结果表明,在系统稳态和暂态过程后期,新的电气测量方法与脉冲法实测的结果吻合得很好,在扰动期间及其后一段时间,两者结果的差别稍大,但具有一致的动态变化趋势;即:新方法具有令人满意的测量精度。
本文关键字:同步发电机 电工技术,电工技术 - 电工技术






