s���бȽϣ���rnd≤Ps��ѡ��ø��壬������̭�ø��塣������Щ��Ӧֵ����ƽ��ֵ�ĸ��壬��rnd≥Ps��ѡ��ø��壬������̭�ø��塣��������������Ⱥ������Щ��Ӧֵ�ϸߵĸ��壬��������Ѱ����ֵʹ�������������ұ�����һЩ“�ϲ��”ֵ���ֱ�֤�˸����ڽ�ռ��еķ�ɢ�ԣ���һ���̶��ϱ�����“����”�������ڲ��õ��Ǿ�����ѡ����ԣ���������ij��Ⱥ�����и���������Ӧֵ�������������壬�ø���Ҳֻ����ѡһ�Σ����ַ���ʹÿ��������ѡ�ĸ�������Ӧֵ�Ĵ�С��ֱ�ӳɱ�������һ���̶��ϱ�����“��������”���ڱ����У����ڸô��е����Ÿ��岻������������ֱ�ӽ�����һ����
����2) �ӽ��ͱ��죺�����ӽ��ͱ��������ģ���ӽ��ͱ���ķ������������������һ��������봮������ͬ�Ķ������봮��Ϊģ�壬Ȼ������ģ������Ӧλ����0����1ȷ���Ƿ�����ӽ��ͱ��졣����������ʹ�����еĸ���λ�õ�ͬ�����ӽ��ͱ���Ļ��ᣬ��ַ���ÿ�����Ʊ��������ã�����������Χ���ҵ����Ž⡣
2.3�Ŵ��㷨��Alopex�����Ľ��
�����Ŵ��㷨��Alopex�������ϵľ�������Ϊ��
�������ӽ����ӵĺ������Alopex����������Alopex�������ڲ����Ӵ���ͬʱ�������һ����“����”��ʹ�Ӵ��븸�������һ���IJ��죬����������ʹ��Ⱥ����һ���Ķ����ԣ�Ҳʹ���㷨�л��������ֲ���Сֵ��������ȫ�����ţ���������һ���̶��ϼӿ������ٶȡ�����Alopex�㷨������������������ǰһ���Ա������亯��ֵ�ı仯��Ϣ����������Ϣ������������������ʱ�䣬������“����”�����������̵Ľ�������Ҳ�������Ż���ȫ������ǰ����
������δ�Ľ���Alopex�����У��Ա�������仯�ͷ���仯�IJ�����ȡ�������ʵ���Ż��У��Ա�����������仯ʱ����Ӧ��СһЩ���������ڲ����������������ֵ�����Ա�������仯ʱ����Ӧ�ô�һЩ����Ϊ�Ա�������仯����Ϊ����ʹĿ�꺯�����Ѿֲ�����ֵ����ˣ����Ķ�Alopex��������һЩ�Ľ����������˱仯�IJ����������в���δȡΪ

����a��γΪ�������ɸ��ݲ�ͬ���Ż�������ѡ����ʵ�ֵ�����Ա�����������仯ʱ����Ӧ��СһЩ(0<γ≤1)���������ڲ����������������ֵ�������Ա�������仯ʱ����Ӧ�ô�һЩ(γ>1)��ʹĿ�꺯���ܹ����Ѿֲ�����ֵ���������ŵ������������ӣ�����δԽ��ԽСҲ����������������ֵ������
3���㲽��
����1) �����й������������ߺͿɵ���ѹ���ֽ�ͷ�������������ƣ��Ѹ��������ֳɼ�����ʱ�Ρ�
����2) ��ÿһ���ֶ��У�ѡ��һ���ӽ��ڸö�ƽ�����ɵĵ����ɵ㣬�Ըõ����ɵ�������Ż����õ���Ӧ�ı�ѹ���ֽ�ͷ��λ�Ͳ�����Ͷ������������ǰN�����Ž⡣
����3) �Ըö�������ĸ��ɵ㣬�����ȹ̶�Ϊ���õ����Ž�ı�ȣ�Ȼ������Ż�(��ֻ���з�����˵�ѹ�Ͳ������Ż�)��
����4) ��������ɵ���й�����֮�ͣ���N�����Ž����ҳ�����֮����С�Ľ���Ϊ�öε��Ż��⡣
����5) ��ÿһ�ֶζ������������㣬ȫ���Ż���Ϻ���ƽ���ĵ�ѹ�ϸ���
��
����
6) ��ƽ����ѹ�ϸ�������Ҫ�����Ż������������ʱ�εı�ѹ���ֽ�ͷ��λ�Ͳ�����Ͷ����������������Ҫ����ѹ�ϸ�����͵�һ���ֶ��ٻ���Ϊ����ʱ�����½���2)��3)��4)��5)���ļ��㡣��
4����
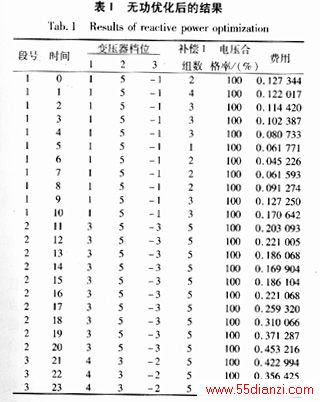
�������ñ���������㷨��IEEE-14Busϵͳ�����˼��㡣һ�츺��������ͼ1��ʾ����Դ�ڵ�ĵ�ѹ��ֵ��Ϊ0.90��1.10�����ɽڵ�ĵ�ѹ��ֵ��Ϊ0.95��1.05����ѹ�����Ϊ0.9��1.1������Ϊ0.0125��һ�춯����������Ϊ6�Ρ��ڲ����ڵ㴦��5���������5���翹����ÿ���ôֵΪ0.1�����ݸ�������ȡ�ֶ���Ϊ3�����Ż���Ľ��Ϊ��1��ʾ��
����
�ӽ����֪����ѹ��1�ܱ仯����Ϊ3����ѹ��2�ܱ仯����Ϊ2����ѹ��3�ܱ仯����Ϊ3��ƽ����ѹ�ϸ���Ϊ100%��������Ҫ��
5����
��������������һ���ڱ�ѹ���ֽ�ͷ�Ͳ������ݶ�������Լ���͵�ѹ�ϸ��ʵ������£�����˶�һ���ڸ��ɽ������Ż��ķֶ��㷨������Ҳ��˿����˵����г������Լ����������������Ŵ��㷨��Alopex�������ϵ��㷨���м��㡣ͨ���������ļ��㣬���˵����������ķ����ǿ��еġ���һҳ [1] [2]
���Ĺؼ��֣���ѹ�� ��ͷ �繤�������繤���� - �繤����






