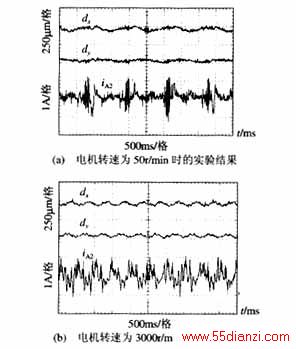
图4(a)和图4(b)分别为电机稳态转速为50r/min和3000 r/min时转子沿x、y方向上径向跳动位移、悬浮控制绕组的相电流。其中转子径向跳动稳态值小于40mm,速度较高时转子径向跳动稳态值小于30mm,电机实现平稳悬浮。
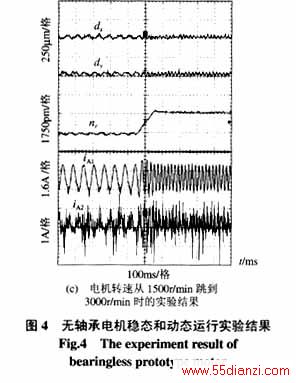
图4(c)为电机转速从1500 r/min突然加速到3000 r/min的过渡特性,图中从上向下依次为x、y方向上径向跳动位移dx、dy、转速nr过渡过程、转矩绕组相电流iA1、悬浮控制绕组的相电流iA2。从图中可以看出,转速突变电磁转矩必然随之变化,但对径向悬浮(位移)没有明显影响,可见悬浮控制子系统实现了独立控制。
实验过程中,电机从50 r/min到6000 r/min的范围内均能实现动态悬浮,转轴径向跳动稳态值小于40mm。转矩绕组分别采用V/f调速控制、转子磁场定向控制或气隙磁场定向控制时,悬浮子系统独立控制性能均很稳定。
6 结论
实现无轴承异步电机的径向力悬浮绕组和转矩绕组的相互独立控制是无轴承异步电机走向实用化和超高速运行的有效手段。本文采用电压模型法辩识了电机转矩绕组的气隙磁链,并在此基础上实现了悬浮绕组的独立控制,从而使转矩绕组采用普通的变频器供电成为可行,提高了无轴承电机运行的可靠性。实验结果表明本文提出的控制算法不仅能实现无轴承电机平稳的悬浮,而在转矩绕组的控制上具有相当灵活性。






