1)遇到紧急行为需要停止运行程序;
2)远程控制行为;
3)避障行为;
4)轨迹跟踪行为。
根据行为控制方法,首先确定功能层的优先级,功能层越低优先级越高,即Leve10优先级最高,在发生意外情况时,人工可以通过结束程序运行来结束进程。人为远程控制作为第一层,可以实现操作员的愿望。突然碰到障碍物时,避开障碍物作为第二层,循迹过程中绕开障碍,才继续循迹。
红外传感器产生的轨迹跟踪行为设置为最高层,因为在跟踪过程中,智能小车以及人的安全性第一,所以它的优先级最低。图5中圆圈中的S为“suppress”的意思,即高优先级的行为抑制低优先级的行为控制,当在轨迹跟踪过程中,突然有障碍出现,智能小车首先启动避障行为,暂停跟踪行为,避障行为结束立即执行跟踪行为。
4 实验结果分析
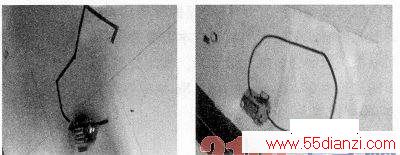
设计的循迹小车具有较好的跟踪效果,分别在地面与白纸上做了轨迹跟踪实验。小车跟踪轨线如图6所示。对于本文设计的智能循迹小车不仅直线能稳定跟踪,即使不规则弯曲的线也能较好地跟踪。
由于在软件中设置了用于防干扰的盲走程序。所以,可以通过使用轨迹线不均匀的误差跑道和过弯测试的方法来检验系统的抗干扰性能。经过测试,当路面的轨迹线不均匀的时候,小车可以根据前一个状态指令进行盲走,可以通过轨迹不均匀的轨迹线段。小车程序段中设置了原地自转的程序,理论上小车可以通过接近180度的弯道。所以小车具有一定的过弯性能。经过测试,在弯道处小车可以通过。但是由于小车的行驶速度控制不均匀,在直线和弯道接触段是有一定冲出跑道的几率的。
小车在循迹过程中出现偶然状态时,即突然遇到一个障碍物时,小车能沿障碍物行走,直到遇到轨线没有障碍物在前面时继续循迹。当障碍物靠得很近或者是在一个封闭的小范围内时,小车可能有时来不及直走就直接右转行驶了,导致小车在这个范围内一直保持右转行驶,在同时检测到没有障碍物与轨线时,说明小车轨线跟踪失败,自动结束程序,小车停止。
5 结论
本文设计出一种基于包容式行为控制的智能循迹小车,采用单片机AT89S51作为控制器,红外传感器检测轨迹线,将检测结果经LM324整形后传给单片机,设计程序输出适合的PWM波控制智能小车左右轮转速。超声波传感器检测障碍物信息,设计模糊避障控制器,将控制器输出结果用于电机转速控制,使智能小车实现自动避障,且绕障碍物行走。在室内外做了大量的实验,本文设计的小车不仅能稳定地跟踪黑色轨迹线,而且遇到障碍物时候能绕障碍物行走。
本文关键字:智能 传感-检测-采集电路,单元电路 - 传感-检测-采集电路






